XiaoMi-AI文件搜索系统
World File Search System立体声
可靠性和更好的性能
会漏掉一部分节目内容。为使单声道听众获得满意的接收效果,广播公司必须减弱立体声效果。通过使用贝尔电话实验室的 F. K. Becker 开发的新型“兼容性”电路,可以消除单声道问题,而不会影响立体声听众。该电路的成功取决于 1933 年发现的一种心理声学现象,即“优先效应”。这种效应的工作原理是,当一个声音通过两个独立的扬声器重现,但其中一个扬声器延迟了几毫秒时,听众会“听到”这个声音,就好像它是从他最先听到的扬声器中传出来的一样。他会判断第二个扬声器是静音的。在新开发中,麦克风拾音器与其相应的无线电或电视发射器之间的电路通过两条延迟线交叉连接,每条延迟线都有自己的缓冲放大器(见图)。1.由于这些交叉连接,来自左麦克风的音乐或语音信号直接传输到左麦克风

UG591:EFR32XG22E能量收获探险家套件
3.4外围设备。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.11 3.4.1 SI7021相对湿度和温度传感器。。。。。。。。。。。。。。。.12 3.4.2 SI7210 HALL效应传感器。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 .12 3.4.3 ICS-43434 MEMS立体声麦克风。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 .13 3.4.4 ICM-40627 6轴惯性传感器。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。.12 3.4.2 SI7210 HALL效应传感器。。。。。。。。。。。。。。。。。。。。。。。。.12 3.4.3 ICS-43434 MEMS立体声麦克风。。。。。。。。。。。。。。。。。。。.13 3.4.4 ICM-40627 6轴惯性传感器。。。。。。。。。。。。。。。。。。。。。.14 3.4.5 VEML6035环境光传感器。。。。。。。。。。。。。。。。。。。。。.15 3.4.6 BMP384气压传感器。。。。。。。。。。。。。。。。。。。。.15 3.4.7外部内存。。。。。。。。。。。。。。。。。。。。。。。。。。。.16 3.4.8按钮和RGB LED。。。。。。。。。。。。。。。。。。。。。。。.16 3.4.9精确的ADC电压参考。。。。。。。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>.16 3.4.10 IADC U.FL连接器。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>.17 div>

重播:通过...
摘要。3 D传感是自动驾驶汽车的基本任务。其部署通常依赖于对齐的RGB摄像机和激光镜头。谨慎的同步和校准,在LiDAR投影的深度图中,系统的错位持续存在。这是由于两个传感器之间的物理基线距离所致。工件通常反映为背景激光雷达错误地投射到前景上,例如汽车和行人。KITTI数据集使用立体声摄像机作为启发式解决方案来删除工件。但是,大多数AV数据集(包括Nuscenes,Waymo和DDAD)都缺少立体声图像,使Kitti解决方案不适用。我们提出了Replay,这是一种无参数的分析解决方案,用于删除投影伪像。我们在假设的虚拟LiDAR相机和RGB摄像机之间构建了一个Binocular视觉系统。然后,我们通过使用拟议的分析溶液确定面孔闭塞来删除投影伪影。我们显示出具有无伪像的深度图的最先进(SOTA)单眼估计器和3 d对象探测器的一致改进。
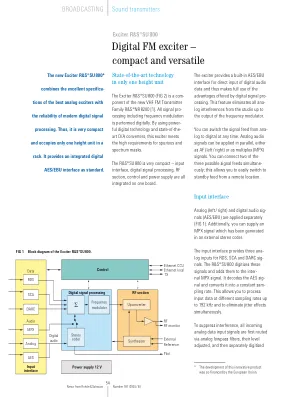
数字 FM 激励器 – 紧凑且多功能 - 罗德与施瓦茨
数字化音频信号通过低通滤波器路由,带通滤波器抑制数据信号频谱之外的干扰信号成分。内部立体声编码器处理滤波后的音频信号以产生符合标准的 MPX 信号。对于立体声信号,您可以设置导频音的级别。数字 MPX 信号用于高精度直接数字合成器 (DDS) 的频率调制。
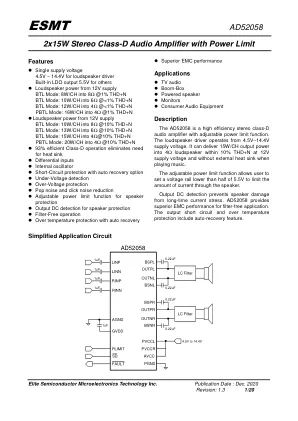
AD52058 2x15W立体声级音频放大器带有功率...
AD52058是具有可调节电源限制功能的高效率立体声类音频放大器。扬声器驱动程序的操作性为4.5V〜14.4V电源电压。它可以在12V电源电压下10%THD+N以内的4扬声器传递15W/CH输出功率,并且在播放音乐时没有外部散热器。

Stereo-Seq™
立体声符号提供纳米级亚细胞分辨率,具有空间转录组测序的较大视野。这是一项有前途的技术,用于研究肿瘤微环境的空间表征,3D转录组学模型的构建,哺乳动物发育生物学中的时空转录组学地图集等等。
1991 电气图和诊断手册
空调................................................................................................................ A-91 加热器................................................................................................................ A-91 辅助加热器.............................................................................................................. A-91 仪表和警告指示器........................................................................................ A-100 音频警报模块...................................................................................................... A-111 后轮防抱死制动器/制动警告......................................................................... A-114 顶灯............................................................................................................. A-118 巡航控制............................................................................................................. A-122 四轮驱动............................................................................................................. A-125 电动后视镜和门锁.................................................................................... A-127 电动车窗............................................................................................................. A-136 收音机 AM 和 AM/FM 立体声............................................................................. A-143 后除雾器............................................................................................................. A-146 后灯.............................................................................................................

标准样本率和高清样本率之间是否有听觉差异?约瑟夫·福萨(Joseph Fossard)中央兰开夏郡1号
本报告中描述的测试的目的是确定是否可以在每秒44.1万个样本(44.1ks/sec)的标准采样频率和96K/sec的较高采样频率之间检测到可听见的差异,如果是这样,则在何种情况下可以感知差异。在每个录制系统上仅使用一个立体声模数转换进行测试,然后在每个复制系统上进行一次数字通知转换,然后将声音发送到其他监视器扬声器系统以供听众评估。自从引入更高的采样频率(通常称为高清音频)以来,人们一直在持续争论。关于在两通道立体声录制上,是否确实有任何改善声音质量的改善,而较高的速率则有所提高。迄今为止发布的大多数测试似乎都使用了具有转换过程的单个源文件(创建了不同样本率的重复文件),或者样本速率之间的比较在记录或播放过程中都不使用相同的设备。但是,要将转换的文件与原始文件进行比较与比较以不同频率记录的两个原始文件的相同,以便测试在相同设备上的两个频率都同时记录。(例如,请参见Pras和Guastavino,2010年。)