XiaoMi-AI文件搜索系统
World File Search System站立
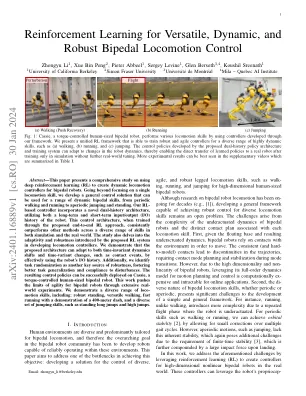
用于多功能,动态和鲁棒的双体运动控制
摘要 - 本文介绍了一项有关使用深钢筋学习(RL)为双皮亚机器人创建动态运动控制器的综合研究。超越了关注单个运动技能的关注,我们开发了一种通用控制解决方案,该解决方案可用于一系列动态的两足动物技能,从定期步行和跑步到Aperiodic的跳跃和站立。我们的基于RL的控制器结合了一种新颖的双历史结构,利用了机器人的长期和短期输入/输出(I/O)历史记录。通过拟议的端到端RL方法进行培训时,这种控制架构始终优于模拟和现实世界中各种技能的其他方法。该研究还深入研究了拟议的RL系统在开发运动控制器时引入的适应性和鲁棒性。我们证明,提出的体系结构可以通过有效使用机器人的I/O历史记录来适应时间不变的动态变化和时间变化的变化,例如接触事件。此外,我们将任务随机化确定为鲁棒性的另一个关键来源,促进了更好的任务概括和对干扰的依从性。可以成功部署所得控制的控制策略,这是一种扭矩控制的人尺寸的两头机器人。这项工作通过广泛的现实世界实验推动了双皮亚机器人的敏捷性限制。我们展示了各种各样的运动技能,包括:坚固的站立,多功能步行,快速跑步,展示了400米仪表板,以及各种各样的跳跃技能,例如站立的跳远和跳高。
虚拟现实不仅欺骗了大脑:脊柱兴奋性在虚拟模拟的跌落
虚拟现实(VR)已知会引起大脑运动区域的大量激活。尚不清楚虚拟现实在多大程度上会触发感觉运动系统,更特别地,它是否会影响较低的神经水平。在这项研究中,我们旨在评估VR模拟具有挑战性和压力的姿势情况(Richie的木板经验)是否可以干扰15位健康的年轻参与者中姿势肌肉的脊柱兴奋性。三头肌肌肉的H-Re the ex在参与者站立并戴着VR头戴式耳机的同时,通过电神经刺激引起。参与者经历了几种情况,在此期间唤起了刺激:站立(Novr)站在地面上的VR(地面VR),站在建筑物的边缘(plankVr)(plankVr)(plankVr),并从建筑物(Fallowvr)掉下来。在整个实验过程中,测量了三头肌肌肉的肌电活性。腿部和头部运动也通过加速度计来测量以说明身体振荡。首先,在条件之间,头部旋转和肌电活性没有差异。第二,从novr到GroundVR和PlankVr不影响三头肌H-Re-Refex(H Max / m max)。最显着的发现是在跌落过程中H-Re-ex的急剧下降(Novr和FallingVR之间的47±26.9%,P = 0.015)。建议在VR中遇到姿势威胁有效地调节脊柱兴奋性,尽管保持了安静的站立姿势。这项研究表明,模拟掉落的模仿神经调整在实际的姿势挑战任务中观察到的神经调整。
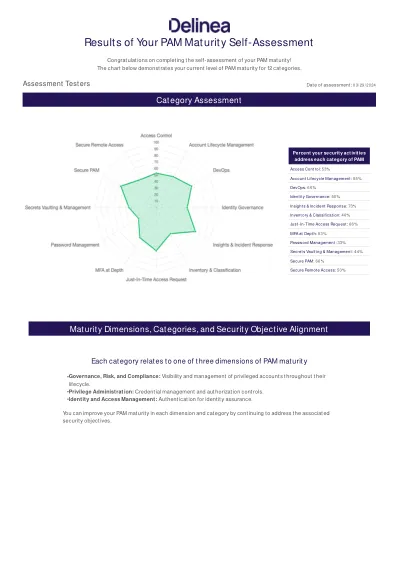
您的pam mat urity自我评估的结果
身份治理能力围绕秘密结帐和会议启动制定政策。自助服务请求工作流在PAM平台内置或通过与第三方工作流(例如ServiceNow)的集成,允许用户请求其他访问权限。这有助于与最佳实践(例如零站立特权)保持一致。
自我 - 螺旋联系人的概念网格
自助力的概念网格与基础架构支持计划中的自助力接触的项目的年度相关概念,必须基于自助率接触的框架条件来创建基础架构支持计划区域帐篷(IFP STZ)。报告通过年度结构化事实报告进行。站立:26.02.2025
SpaceYaTech 实习计划
我们的计划旨在提供全面而有条理的学习体验。实习生将经历该计划的两个阶段。首先,实习生将开始执行主管在 Mentorlst 和 SpaceYaTech 软件产品中分配给他们的任务。实习生将每周三次在站立会议上解释他们所做的事情。每周五,实习生都会在 AMA 会议上与各种行业专家会面。

AI使用BCI设备和基于FBG的感官平台用于足底压力测量的人体步态的大脑信号预测
摘要:为生物医学问题开发现代解决方案(例如人类康复步态的预测)中的人工智能(AI)正在发展。试图通过安装在单孔上的FIL BRAGG光栅(FBG)传感器,与脑部计算机界面(BCI)设备同时使用足底压力信息,以预测与人的坐着,站立和行走姿势相对应的大脑信号。的姿势分类范围。这些型号用于识别从16通道BCI设备的四个用户的坐,站立和步行活动响应的电极。基于10–20脑电图系统(EEG)的六个电极位置被鉴定为对足底活性最敏感的位置,并发现与脚步运动过程中感觉运动皮层的临床研究一致。与均值最低的FBG数据相对应的大脑脑电图(MSE)值(0.065–0.109)是通过选择长期术语记忆(LSTM)机器学习模型进行的,与复发性神经网络(RNN)和门控复发单元(GRU)模型相比,进行了。

facioscapulohumeral肌肉营养不良
当脊柱周围的肌肉削弱时,将色谱柱退出对准。未对准会导致脊柱侧弯,脊柱弯曲到侧面。当背部的肌肉较弱时,个体难以直立站立,脊柱在下背部向内弯曲,被称为Lordosis。脊柱侧弯和脊柱障碍可能在FSHD中是温和的。

脊髓损伤后利用大脑自然行走……
脊髓损伤会中断大脑与脊髓中负责行走的区域之间的通讯,导致瘫痪 1,2 。在这里,我们通过大脑和脊髓之间的数字桥梁恢复了这种通讯,使患有慢性四肢瘫痪的患者能够在社区环境中自然地站立和行走。这种脑脊柱接口 (BSI) 由完全植入的记录和刺激系统组成,它们在皮质信号 3 与针对参与行走的脊髓区域的硬膜外电刺激的模拟调制之间建立了直接联系 4–6 。高度可靠的 BSI 可在几分钟内校准。这种可靠性在一年多的时间里一直保持稳定,包括在家中独立使用期间。参与者报告说,BSI 使他能够自然控制腿部的运动,以站立、行走、爬楼梯甚至穿越复杂的地形。此外,由 BSI 支持的神经康复改善了神经系统恢复。即使关闭 BSI,参与者也重新获得了拄拐杖在地面上行走的能力。这座数字桥梁建立了一个恢复瘫痪后自然运动控制的框架。