XiaoMi-AI文件搜索系统
World File Search System笛卡尔

为全球3D + 3V混合vlasov的启用技术的近地空间模拟
vlasiator是一种杂种 - vlasov空间等离子体模拟系统,设计用于对近地环境进行动力学模拟。1它的目标是使用它来执行地球磁层的全局三维模拟,以及与太阳风的相互作用,而没有固定的颗粒速度分布函数形状的固定处方[在mag-Netohyhyhydrodynarymists(MHD)中就是这种情况]。作为混合动力学方法的实现,Vlasiator通过在笛卡尔网格上传播相空间密度,将离子作为六个(三个空间和三个速度)维度的分布函数进行建模,从而模拟离子物种的相位进化。电子以间接方式处理,其有效的物理作用降低为电荷中和,霍尔的术语以及对欧姆定律的贡献。2在VLASITOR的数值实现中,故意选择相位空间的表示,而不是粒子中的粒子(PIC)近似的常见方法,3表示模拟在计算上非常重,通常超过几分钟的模拟物理时间的CPU小时数。另一方面,此选择可以实现
法国公众对未来 COVID-19 疫苗的态度
COCONEL 集团成员包括:Patrick Peretti-Watel 2,3(科学协调员)、Valérie Seror 2、Sébastien Cortaredona 2、Odile Launay 4、Jocelyn Raude 5、Pierre Verger 3(研究联盟)、François Beck 6、Stéphane Legleye 6、Olivier L'Haridon 7、Jeremy Ward 1,2(指导委员会)。 1. GEMASS、CNRS、巴黎索邦大学、巴黎 2. 艾克斯马赛大学、IRD、AP-HM、SSA、VITROME,马赛。 3 马赛东南卫生区域观察站(ORS Paca)。 4 法国卫生与医学研究院 CIC 1417;巴黎大学,巴黎笛卡尔医学院; AP-HP,科钦医院;巴黎。 5 雷恩 EHESP 公共卫生学院。 6 巴黎南部大学 CESP、UVSQ 医学院、INSERM、巴黎萨克雷大学、维尔瑞夫。 7 雷恩大学,法国国立科学研究院,CREM UMR 6211,雷恩
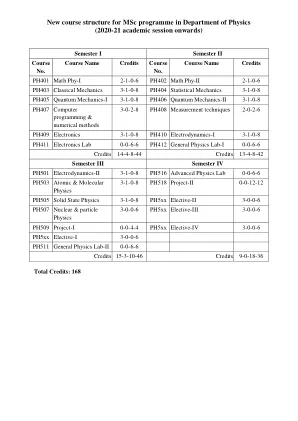
物理系理学硕士课程的新课程结构
PH401:数学物理 I (2-1-0-6) 线性代数:线性向量空间:对偶空间和向量、柯西-施瓦茨不等式、实数和复数向量空间的定义、度量空间、线性算子、子空间;跨度和线性独立性:行减少和方法;基础和维度:使用简化的跨度和独立性测试 (RREF) 方法;线性变换:图像、核、秩、基础变换、转移矩阵、同构、相似变换、正交性、Gram-Schmidt 程序、特征值和特征向量、希尔伯特空间]。张量:内积和外积、收缩、对称和反对称张量、度量张量、协变和逆变导数。常微分方程和偏微分方程:幂级数解、Frobenius 方法、Sturm-Liouville 理论和边界值问题、格林函数;笛卡尔和曲线坐标系中不同波动方程的分离变量法,涉及勒让德、埃尔米特、拉盖尔和贝塞尔函数等特殊函数以及涉及格林函数的方法及其应用。教材:

Novavax 任命博士。 Ruxandra Draghia-Akli 出任新任执行副总裁兼研发主管
Draghia-Akli 博士曾在知名制药公司和小型生物技术公司工作。她最近担任强生公司全球公共卫生研发全球主管,带头开展了加速多个疾病领域药物发现和开发的计划,包括登革热、结核病、麻风病和冠状病毒。此前,Draghia-Akli 博士还曾担任默克公司全球疫苗副总裁,为推进针对埃博拉、肺炎球菌病和人乳头瘤病毒的创新疫苗做出了贡献。她还与欧盟委员会合作,支持研究和创新方面的计划、立法、监管和政策问题。她还担任过越来越重要的职务,负责在 Advisys, Inc.(现为 Inovio Pharmaceuticals 的一部分)争取启动资金和补助金。Draghia-Akli 博士在职业生涯早期专注于贝勒医学院、勒内笛卡尔大学(巴黎)和卡罗尔达维拉大学(罗马尼亚)的研究。

MPC计划安全和可信赖的机器人动议
摘要 - 安全人类机器人相互作用(HRI)的策略,例如已建立的安全运动单元,为生物力学上安全的机器人运动提供了速度缩放。此外,值得信赖的HRI需要基于心理的安全方法。此类方案可以非常保守,并且在机器人运动计划中应效率地符合此类安全方法。在这项研究中,我们通过模型预测控制机器人运动计划器提高了先前引入的基于心理安全性的安全性方法的效率,该方法同时调整了笛卡尔路径和速度,以最大程度地减少到目标姿势的距离。下属实时运动发生器通过整合安全运动单元来确保人体安全。我们的运动计划者通过两个实验验证。同时调整路径和速度可以实现高度时间的机器人运动,同时考虑了人类的身体和心理安全。与直接路径速度缩放方法相比,我们的计划者可以实现28%的运动执行。

机器人运动技能的加固学习中的动作空间设计
增强学习(RL)是合成机器人运动技能的强大工具。但是,实践者必须仔细选择学习的动作空间,这一决定通常以直觉为指导。例如,轮式机器人可能与车轮速度动作空间,具有关节位置的腿部机器人以及带有笛卡尔空间目标的操纵器相关联。对于一些精心研究的任务,该领域已在共同的动作空间上汇聚。例如,位置控制动作空间被广泛用于学习腿部运动[1,2,3]。但是,为了启动机器人的运动,这些位置命令必须通过反馈定律转换为扭矩,以执行模拟和控制真实的机器人。这提出了几个问题:位置控制的哪些属性使其对于腿部运动任务特别有用,而不是直接学习使用扭矩行动?位置控制对所有类型的机器人任务有用,还是其他能力更有效的动力空间对具有不同动态的系统更有效?其他未经研究的任务将如何从不同的动作空间设计选择中受益?
问题1.人工智能作为一门科学......
问题 1.人工智能作为一个科学领域 人工智能 (AI) 作为一个与尝试形式化人类思维相关的科学领域有着悠久的历史。柏拉图、亚里士多德、笛卡尔、莱布尼茨和许多其他研究人员试图将思维过程描述为一系列基本运算。 “人工智能”一词首次出现在 1956 年夏天于美国达特茅斯举行的一次科学会议上。一方面,它被认为是创造能够进行与人类智力活动相当的智力活动的软件和硬件的理论。另一方面,既有软件,也有硬件,以及在它们的帮助下所完成的工作。人工智能包括以下技术: 问题解决、专家系统、支持系统和决策; 识别图像、动作等的系统; 文本处理和机器翻译系统; - 游戏程序。例如国际象棋; - 学习和培训系统; - 机器人和自主代理; 以自然语言与用户交互。人工智能系统是一套软件和硬件,其使用应产生与人类智力活动相同的结果。人工智能作为一门科学领域,与哲学、心理学、语言学、人类学等密切相关。

朝着低 - 和中间的靶向干预措施
1 Pathogenesis and Control of Chronic Infections, University of Montpellier, Inserm U1058, Etablissement Français du Sang, Montpellier University Hospital, 60 Rue de Navacelles, 34394 Montpellier, France 2 Hai Phong University of Medicine and Pharmacy, 72A Nguyen Binh Khiem, 18000 Hai Phong City, Vietnam 3 CESP/Inserm U1018,巴黎大学和巴黎笛卡尔大学,中心,法国红十字会,27 Rue Pierre Nicole,75005 Paris,Paris,Paris,法国4支持社区发展计划,240 Mai Anh tuan,Cho Dua,Dong Da,Dong Da,Hanoi,Hanoi,Hanoi,Hanoi,Hanoi,Hanoi,Hanoi,Hanoi,越南5感染性疾病部门传染病和热带疾病,越越野医院,Hai ba Trung,Cat Dai,Hai Phong,越南7学院,纽约大学,纽约,美国8 ABT Associates,惠勒街55号,02138,剑桥,马萨诸塞州,美国马萨诸塞州,美国马萨诸塞州,美国,美国。

SIDECAR项目:欧洲儿科和年轻成人心脏缺陷患者的S-ICD注册
1儿科心脏病学和心律失常/晕厥部门,小儿心脏病学和心脏外科,意大利罗马的BambinoGesù儿童医院IRCCS; 2荷兰阿姆斯特丹阿姆斯特丹医学中心儿科心脏病学系; 3比利时安特卫普大学的实验医学实验室和儿科实验室; 4法国巴黎儿科心脏病学Hopital Kender-Enfants Marades Marades; 5 Hopital Marie Lannelongue-M3C,GHPSJ,巴黎笛卡尔大学,法国巴黎; 6德国莱比锡莱比锡大学心脏中心儿科心脏病学系; 7小儿心脏病学和先天性心脏缺陷,波兰格丹斯克医科大学; 8 Gottsegen国家心血管中心,布达佩斯,匈牙利; 9心脏手术团队,小儿心脏病学和心脏外科系,意大利罗马的BambinoGesù儿童医院IRCCS; 10心脏病学和电疗系,波兰格丹斯克医科大学;比利时Edegem的安特卫普大学医院儿科学系11;荷兰莱顿莱顿大学医学中心儿科心脏病学系

迈向人机共创的社会理论
摘要 本文综合了当前理解人机交互的理论尝试,并介绍了七个前提,以理解我们日益强大、普及和可立即访问的算法所带来的新兴动态。希望这七个前提能够构建人机共创的社会理论。关注人机共创旨在强调两个因素。首先,我们的机器学习系统是社会化的。其次,人类思维和人工智能系统的共同进化性质,因为智能设备构成了我们认知支架不可或缺的一部分,从而塑造了我们对世界和自己的感知。这七个前提包括:社会结构的首要地位;人类对自由和自主的渴望;人工智能系统将成为我们认知/情感支架不可分割的一部分,并可以改变我们的自我理解;人类繁荣的哲学和人文基础作为人机交互的指导;心灵海绵信息过滤过程;价值观在人机交互中如何变化和出现的文化适应过程;人与人、人与自然、人与机交互的重叠维恩图。本文最后讨论了人类在与社会化机器纠缠中的能动性以及笛卡尔代理对心灵的看法的虚幻性。