XiaoMi-AI文件搜索系统
World File Search System等高线

地块平面图 - 立面图
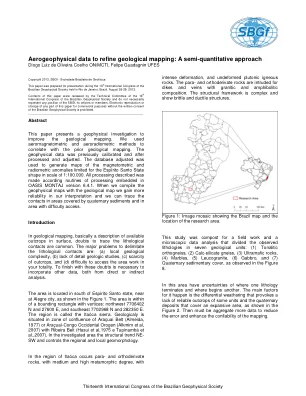
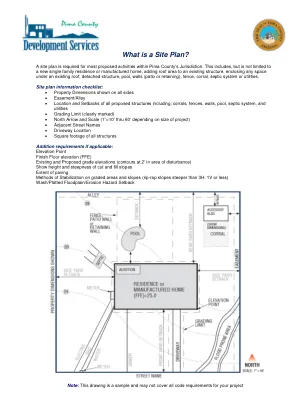
高程是位于已知固定高程点上方或下方的点。该固定点可以是已知海平面以上的测量高程,例如位于洪水区域的房产,也可以是任意高程点,所有其他场地高程均以此为基准。重要因素是相对于同一场地上其他点的上下相对高程。建筑物和任何附属建筑物的所有角落、房产的角落以及距离建筑物 50 英尺处都需要高程点。如果地块平面图上有等高线,则仅需要角落建筑物高程。此外,街道或道路水平的高程以及车道入口的点也需要高程。

奥林达市计划清单
1. 场地平面图 包括北箭头、图例和比例尺。 显示所有产权线并标注边界和范围。 标明所有必需的退让距离。 显示地块内和相邻的所有公共和私人道路、通行权和地役权,并标注完整尺寸。标明是公共的还是私人的。标明地役权的性质。 显示所有现有和拟议建筑物的占地面积以及所有产权线的尺寸。对现有建筑物的所有更改或添加都应以气球、阴影线或以其他方式突出显示。 标明树干位置、滴水线、树干直径为六 (6) 英寸或更大的所有现有树木的种类和大小(在地面以上 4.5 英尺处测量)。用“X”标记任何拟移除的树木。如果场地上没有树木,请在平面图上注明“场地上没有树木”。 显示任何重要的排水特征,包括洼地、小溪(在平面图和剖面图中显示必需的小溪退让距离)和河岸栖息地。如果没有现有和/或拟议的排水改进,请在计划中注明。 显示所有现有和拟议的不透水表面,包括但不限于人行道、屋顶、露台、楼梯、泳池甲板和车道,并注明所有现有和新的不透水表面的平方英尺数。 指出所有现有和拟议的有盖/无盖停车设施和车道。 指出现有和拟议的挡土墙和围栏的位置和尺寸。 指出现有和拟议的污水管道的位置。 对于平均坡度大于 20% 的房产,现有和拟议的地形等高线(最小等高线间隔为 10 英尺),针对距离任何拟议的场地改进或排水设施 20 英尺内的土地。
航空地球物理数据用于完善地质测绘 - SBGf
处理后,我们对调整后的数据进行插值,并绘制等高线图。等高线图由规则网格制作而成。它们由 125 m x125 m 大小的方形网格插值而成。这相当于航线间距的四分之一。由于采集的分辨率,在线路中发现的无误差小值为 125 米。较大的值表示等高线图中的间隙。要区分异常,必须减去区域背景的发现值。Lowrie (2007) 表示,磁异常源于具有不同磁性的岩石之间的磁化对比。然而,异常的形状不仅取决于源物体的形状和深度(如重力法),还取决于其相对于剖面和感应磁场的方向,而感应磁场本身的强度和方向会随着地理位置的变化而变化。根据 Khameis 和 Nigm (2010) 的说法,一个有用的

TC 3-04.4 飞行基础
图 3-3。深度感知 ...................................................................................................... 3-9 图 3-4。世界上的沙漠地区 ...................................................................................... 3-13 图 3-5。沙质沙漠地形 ............................................................................................. 3-14 图 3-6。岩石高原沙漠地形 ...................................................................................... 3-15 图 3-7。山地沙漠地形 ............................................................................................. 3-15 图 3-8。世界上的丛林地区 ............................................................................................. 3-20 图 3-9。风的类型 ............................................................................................. 3-25 图 3-10。微风 ............................................................................................................. 3-25 图 3-11。中等风 ................................................................................................ 3-26 图 3-12。强风 ................................................................................................ 3-26 图 3-13。山波(驻波) ................................................................................ 3-27 图 3-14。与山波相关的云层形成 ............................................................. 3-28 图 3-15。转子流动湍流 ................................................................................ 3-28 图 3-16。风过山脊 ............................................................................................. 3-29 图 3-17。蛇形山脊 ............................................................................................. 3-30 图 3-18。风过树冠 ............................................................................................. 3-30 图 3-19。肩部风 ................................................................................................ 3-31 图 3-20。穿越峡谷的风 ........................................................................................ 3-31 图 3-21。山地起飞 ............................................................................................. 3-32 图 3-22。高空侦察飞行模式 ............................................................................. 3-35 图 3-23。使用圆形机动计算风向 ............................................................. 3-37 图 3-25。计算两点之间的风向 ................................................................................ 3-36 图 3-24。进近路径和要避开的区域 .............................................................................. 3-38 图 3-26。贴地或等高线起飞(地形飞行) ...................................................................... 3-40 图 3-27。以 45 度角穿越山脊(地形飞行) ...................................................................... 3-41 图 3-28。在地形飞行高度进行大转弯或爬升 ............................................................................. 3-41 图 3-29。沿山谷飞行(地形飞行) ............................................................................. 3-42 图 3-30。贴地或等高线进近(地形飞行) ...................................................................... 3-43 图 4-1。座舱照明 ...................................................................................................... 4-2 图 4-2。光照水平 ...................................................................................................... 4-3 图 4-3。明视觉 ...................................................................................................... 4-4 图 4-4。中视觉 ...................................................................................................... 4-4 图 4-5。暗视觉 ...................................................................................................... 4-5 图 4-6。白天盲点 ...................................................................................................... 4-5 图 4-7。夜间盲点 ...................................................................................................... 4-6 图 4-8。传感器可以看到什么................................................................................................ 4-6 图 4-9。图像增强器 ...................................................................................................... 4-7 图 4-10。飞行员夜视成像系统操作顺序 ...................................................................... 4-8 图 4-11。微通道板 ...................................................................................................... 4-8 图 4-12。荧光屏 ...................................................................................................... 4-8 图 4-13。光晕效应 ...................................................................................................... 4-9 图 4-14。配重 ...................................................................................................... 4-9 图 4-15。热传感器................................................................................................ 4-11 图 4-16。大气效应............................................................................................... 4-12
场地规划/修订场地规划清单
□ 规划与场地批准的有效规划和地籍图相一致。 □ 规划与相邻场地批准的有效规划和地籍图相结合。 □ 规划与场地批准的分区和/或特定使用许可相一致。 □ 显示当前和拟议的物业边界/地界。根据需要标注距离和方位或曲线数据。 □ 地块符合最小地块正面、地块宽度、地块深度和地块面积标准。 □ 标注拟议的地块和街区名称。 □ 标注每个地块的面积(以英亩和平方英尺为单位)。 □ 测量物业边界到最近的相交街道或车道的尺寸。 □ 显示并标注以海平面基准为参考的一英尺等高线处的现有地形。 □ 显示并标注以海平面基准为参考的一英尺等高线处的拟议地形。可以使用点高程,但不能代替等高线。 □ 显示并标注洪泛区、排水道和小溪。 □ 显示并标注前院、侧院和后院建筑物退缩距离。 □ 显示并标注现有和拟建建筑。提供建筑物的一般尺寸和建筑物之间的距离。□ 对于每栋建筑,标注拟建用途、建筑总面积(平方英尺)、建筑高度(层数)和建筑高度(以英尺为单位,以建筑最高部分为单位)。□ 如果拟建地块毗邻或包含 100 年开发条件洪泛区,则标注每栋建筑的最低完工楼层标高。□ 显示并标注车辆流通车道、私人车道、消防车道和车道。标注现有或拟建。用 10% 的点画图案遮蔽消防车道;不要使用灰度阴影。标注路面宽度、ROW 和/或地役权宽度、车道喉宽、半径以及车道与交叉街道之间的距离。标注路面结构(例如沥青、混凝土等)。□ 显示至少两个车辆出入口。□ 显示、标注和标注可见性出入口维护 (VAM) 地役权和角夹。 □ 地段之间设有地役权内的交叉通道。 □ 显示、标记和标注直通车道,包括所有停靠点(菜单板、窗户等)和堆放处。 □ 车辆通道、私人车道、消防车道和私家车道与场地的交通影响分析一致。 □ 显示停车区。标记为现有或拟议。标记路面结构(例如沥青、混凝土等)。标注停车位尺寸并标注每层停车位的停车位数量。显示和标记无障碍停车位,包括无障碍乘客装卸区和路线。显示、标记和标注所需的路外装卸空间 □ 死胡同停车位的深度不应超过六个停车位。 □ 超过 150 英尺的死胡同消防车道需要有经批准的掉头处。 □ 显示和标记场外停车位。标注从场外停车场到最近的设施的距离,场外停车场将提供支持。 □ 显示和标记景观区域。不要使用树木标记。□ 显示、标记和尺寸(宽度)所需的景观缓冲区。不要使用树木标记。□ 显示现有和拟议的水利设施和相关地役权。尺寸地役权宽度。标记线尺寸。显示和标记水表并提供识别符号。显示和标记阀门、消防部门连接、消防栓、探测器检查室和其他相关结构。□ 提供水表时间表。时间表应包含仪表符号标识、仪表类型(家用或灌溉)、仪表尺寸、仪表数量,并注明现有或拟议的仪表
对 PEA 第 17 卷草案的删节评论
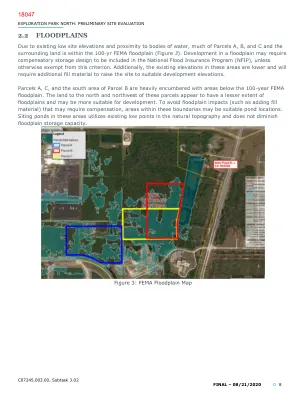
下图(图 4)表示现有的地形等高线和高程,来源于佛罗里达州应急管理局 (FDEM) 的 LiDAR 数据。虽然这些信息不提供设计级地形勘测数据,但却提供了一个有价值的分析工具,可用于确定现有的排水模式和大致高程。所显示的信息与从 FEMA 洪泛区地图和前几张图所示的湿地位置收集的数据一致。该地形信息显示,地块 B 和 C 的北部和西部有高地(平均海拔大约为 3'-4' NAVD88),而地块 B 和 C 的东部/南部海拔较低(平均海拔大约为 2'-3' NAVD88)。地块 A 的高地海拔大约为 2'-4',但包含大量地表水和海拔较低的洼地。进口填充成本可能因场外材料的可用性和接近性而有很大差异;然而,该地区最近的项目数据显示,每立方码进口填料(现场压实和粗略分级)的成本约为 30 美元。这相当于将一英亩土地抬高 1 英尺的成本约为 50,000 美元。该指标将用于确定所提议的每个替代方案的估计土方成本。

FDM 10-1 概述
该原则涉及使用临时和永久的最佳管理实践。应审慎规划和实施这些实践,以防止沉积物进入环境和客户敏感区域。实践包括利用: - 平坦的边坡,将其磨圆并与自然地形融合,并为施工设备提供足够的通行权或临时地役权以进行工作; - 排水渠的设计充分考虑了宽度、深度、坡度、边坡、对齐、能量耗散和防护处理; - 防护性地面覆盖物,如植被、覆盖物、侵蚀垫或护堤,有助于防止发生侵蚀; - 堤坝和拦截堤坝等分流措施,有助于将片流转移出受干扰区域; - 斜坡排水沟或水槽,用于将径流引导到适当的位置; - 沉积物控制装置,如陷阱、水池、石头或岩石沟渠检查站、侵蚀包或淤泥栅栏(不得用于渠道),有助于过滤掉沉积物; - 地下水拦截设施的位置和间距; - 特殊的平整方法,如使等高线斜坡变粗糙或用带防滑钉的推土机平整,以降低径流速度并使沉积物沉淀下来; - 可用的技术援助。

1444927.pdf - 科学图书馆
测量员在获取用于采矿应用的精确空间数据时面临的挑战之一是在崎岖地形和难以进入或无法进入的区域获取数据的风险。随着现代技术的出现,现在可以安全地获取准确的地理空间数据,以便定期进行适当的采矿记录。在矿山测量中使用无人机 (UAV) 进行数据采集是一种快速高效地获取可靠地理空间数据的可行方法。本研究的主要目标是开发一种基于无人机的半自动系统,用于获取估算土方量所需的空间数据。使用 DJI Phantom 4 四轴飞行器采集项目现场的图像数据,并使用 Pix4Dmapper v2.0.1 将图像处理成数字高程模型 (DEM),然后将其导入基于 MATLAB 的土方工程量自动估算系统中。因此,将从自动化系统获得的体积与直接从 Pix4Dmapper 软件获得的体积进行比较,其中指定等高线间隔为 1,允许误差率为 ± 3% 作为标准误差。虽然在使用 Pix4Dmapper 估算的体积中观察到 ± 1.02% 的误差,但开发的自动化系统在其体积估算中产生的估计精度为 ± 0.81%,这证明在准确性和精度方面对于自动体积估算更为可靠。

场地规划要求 - 卢卡斯县
规划要求 ☐ 北箭头 ☐ 分区批准验证 ☐ 所有产权线和地块面积的位置和尺寸 ☐ 所有拟议开发细节的位置和尺寸,包括建筑物、车道、铺砌表面、甲板、排水系统、化粪池系统等。 ☐ 标明任何公共通行权、产权地役权和所需退距的线条和尺寸 ☐ 扰动区域:以任何方式改造地面的所有区域,包括草坪和景观美化 ☐ 现有和新提议结构的位置,每个结构都有清晰的标签 ☐ 标明提议建筑的完工楼面标高。 ☐ 地块角落和产权线沿线每 50 英尺的现有和提议点坡度 ☐ 现有和提议的 1 英尺等高线 ☐ 现有的场外点高程,包括产权线 50 英尺范围内的结构 ☐ 提议的排水措施,如沟渠、土丘、排水管道系统等,并提供足够的信息以供评估。包括:直径、尺寸、坡度、底面/覆盖高度、材料特性等。 ☐ 建议的场地坡度,显示车道、露台、人行道的坡度 ☐ 排水箭头,显示新开发项目的排水流量。请注意,排水不能影响附近的地块,应由建议的坡度信息支持。