XiaoMi-AI文件搜索系统
World File Search System经编

审查 Ofgem 对能源供应市场的监管
Oxera Consulting LLP 是一家有限责任合伙企业,在英国注册编号为 OC392464,注册办事处:Park Central, 40/41 Park End Street, Oxford OX1 1JD, UK;在比利时注册编号为 0651 990 151,分公司:Avenue Louise 81, 1050 Brussels, Belgium;在意大利注册编号为 REA 编号为 RM - 1530473,分公司:Via delle Quattro Fontane 15, 00184 Rome, Italy。Oxera Consulting (France) LLP,法国分公司,注册办事处:60 Avenue Charles de Gaulle, CS 60016, 92573 Neuilly-sur-Seine, France,在楠泰尔注册,RCS 编号为。 844 900 407 00025。Oxera Consulting (Netherlands) LLP,荷兰分公司,注册办事处:Strawinskylaan 3051, 1077 ZX Amsterdam,荷兰,在阿姆斯特丹注册,KvK 编号 72446218。Oxera Consulting GmbH 在德国注册,编号 HRB 148781 B(夏洛滕堡地方法院),注册办事处:Rahel-Hirsch- Straße 10, Berlin 10557,德国。
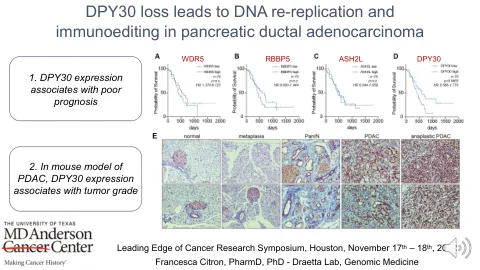
DPY30 缺失导致胰腺导管腺癌中的 DNA 重新复制和免疫编辑
本研究由 AIRC 和欧盟“地平线 2020”研究与创新计划资助,资助协议编号为居里夫人 800924,并由 2020 年 AACR-阿斯利康 START 资助,资助编号为 20-40-12-CITR
开发太阳能解决方案
SSE Energy Solutions 是以下公司的贸易名称:SSE Energy Supply Limited 在英格兰和威尔士注册,编号为 03757502;SSE Heat Networks Limited 在苏格兰注册,编号为 SC303682;SSE Utility Solutions Limited 在英格兰和威尔士注册,编号为 06894120;TESGL Limited 在英格兰和威尔士注册,编号为 08462158。SSE 集团的所有成员。注册办事处为:SSE Energy Supply Limited 和 SSE Utility Solutions Limited,No.1 Forbury Place 43 Forbury Road Reading RG1 3JH;SSE Heat Networks Limited,Inveralmond House 200 Dunkeld Road Perth PH1 3AQ;TESGL Limited,Ocean Court Caspian Road Atlantic Street Altrincham WA14 5HH
超距离极化辅助能量转移有机微腔。
D.G.L. 想到了这个想法。 K.G. 设计和制造样品。 K.G. 设计并执行了稳态光学实验。 R.J.进行了TM并进行了耦合振荡器模拟。 K.G. 和A.O. 进行了泵探针表征测量。 K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。D.G.L.想到了这个想法。K.G. 设计和制造样品。 K.G. 设计并执行了稳态光学实验。 R.J.进行了TM并进行了耦合振荡器模拟。 K.G. 和A.O. 进行了泵探针表征测量。 K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。K.G.设计和制造样品。K.G. 设计并执行了稳态光学实验。 R.J.进行了TM并进行了耦合振荡器模拟。 K.G. 和A.O. 进行了泵探针表征测量。 K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。K.G.设计并执行了稳态光学实验。R.J.进行了TM并进行了耦合振荡器模拟。 K.G. 和A.O. 进行了泵探针表征测量。 K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。R.J.进行了TM并进行了耦合振荡器模拟。K.G. 和A.O. 进行了泵探针表征测量。 K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。K.G.和A.O.进行了泵探针表征测量。K.G. 分析了数据。 所有作者都讨论了结果。 K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。K.G.分析了数据。所有作者都讨论了结果。K.G. 编写了D.G.L.的重要贡献。 谁也负责整个项目。K.G.编写了D.G.L.的重要贡献。谁也负责整个项目。

可靠性和可维护性 (RAM) 培训
认识到需要帮助项目经理更好地理解安全和保障技术,Gary G. Kelm、Frank J. Barber 和 Frank J. Barina 编写了附录 B。Kam L. Wong 使用 Charles Ryerson 和 Irwin Quart 提供的信息和概念编写了我们之前的工作簿 RP-1253 的第一章;感谢 North-Holland, Inc. 允许重印部分图表和文本。感谢 Fredrick D. Gregory、Michael A. Greenfield 博士、Peter Rutledge 博士、Vernon W. Wessel 和 Frank Robinson, Jr. 的鼓励和支持,让专业开发团队为我们的 NASA 安全培训课程 017 开发这本新工作簿。Henry A. Malec 已经去世,我们将怀念他。人们将永远记住他为推动可靠性协会所做的努力。他编写了本书原版的第 7、10 和 11 章。Martha Wetherholt 和 Tom Ziemianski 编写了第 8 章和第 9 章。感谢数字设备公司的数字出版社提供第 7 章中的软件评估材料。Vincent R. LaUi,现任美国宇航局格伦研究中心(俄亥俄州克利夫兰)风险管理顾问,编写了一些新章节和附录 C,添加了一些问题,并编辑和负责本手册修订版的最终 NASA 印刷。

ivor探索更改为Kraken Energy Corp.的名称,并开始在加拿大证券交易所以新的股票符号“ UUSA”效果进行交易
从今天开始的市场开放,公司的普通股将以新名称开始在加拿大证券交易所进行交易,公司的交易符号将从“ Ivor”变为“ UUSA”。公司的新CUSIP编号为50075x102,而新的ISIN编号为CA50075X1024。公司的股本保持不变。
可靠性和可维护性 (RAM) 培训
认识到需要帮助项目经理更好地理解安全和保障技术,Gary G. Kelm、Frank J. Barber 和 Frank J. Barina 编写了附录 B。Kam L. Wong 使用 Charles Ryerson 和 Irwin Quart 提供的信息和概念编写了我们之前的工作簿 RP-1253 的第一章;感谢 North-Holland, Inc. 允许重印部分图表和文本。感谢 Fredrick D. Gregory、Michael A. Greenfield 博士、Peter Rutledge 博士、Vernon W. Wessel 和 Frank Robinson, Jr. 的鼓励和支持,让专业开发团队为我们的 NASA 安全培训课程 017 开发这本新工作簿。Henry A. Malec 已经去世,我们将怀念他。人们将永远记住他为推动可靠性协会所做的努力。他编写了本书原版的第 7、10 和 11 章。Martha Wetherholt 和 Tom Ziemianski 编写了第 8 章和第 9 章。感谢数字设备公司的数字出版社提供第 7 章中的软件评估材料。Vincent R. LaUi,现任美国宇航局格伦研究中心(俄亥俄州克利夫兰)风险管理顾问,编写了一些新章节和附录 C,添加了一些问题,并编辑和负责本手册修订版的最终 NASA 印刷。

对神经形态和脉冲神经网络模拟器的性能进行基准测试
⋆ 注意:本稿件部分由 UT-Battelle, LLC 撰写,合同编号为 DE-AC05-00OR22725,与美国能源部签订。美国政府保留,出版商在接受文章发表时,承认美国政府保留非独占、已付费、不可撤销的全球许可,以出版或复制本稿件的已出版形式,或允许他人这样做,用于美国政府目的。能源部将根据 DOE 公共访问计划 (http://energy.gov/downloads/doe-public-access-plan) 向公众提供这些联邦资助研究的结果。⋆⋆ 本材料基于美国能源部科学办公室高级科学计算研究办公室支持的工作,合同编号为 DE-AC05-00OR22725。本研究使用了橡树岭领导计算设施的资源,该设施是美国能源部科学办公室用户设施,合同编号为 DE-AC05-00OR22725。本研究使用了橡树岭国家实验室的科学计算和数据环境 (CADES) 资源,该环境由美国能源部科学办公室支持,合同编号为 DE-AC05-00OR22725。我们要感谢 Chris Layton 对我们使用 CADES Cloud 的支持。我们还要感谢 Bill Kay 对图形算法的贡献。
伦敦盖特威克机场对当地经济的影响:2023 年
Oxera Consulting LLP 是一家有限责任合伙企业,在英格兰注册编号为 OC392464,注册办事处:Park Central, 40/41 Park End Street, Oxford OX1 1JD, UK;在比利时注册编号为 0651 990 151,分公司:Spectrum, Boulevard Bischoffsheim 12-21, 1000 Brussels, Belgium;在意大利注册编号为 REA 编号 RM - 1530473,分公司:Via delle Quattro Fontane 15, 00184 Rome, Italy。Oxera Consulting (France) LLP,法国分公司,注册办事处:60 Avenue Charles de Gaulle, CS 60016, 92573 Neuilly-sur- Seine, France,在楠泰尔注册,RCS 编号为。 844 900 407 00025。Oxera Consulting (Netherlands) LLP,荷兰分公司,注册办事处:Strawinskylaan 3051, 1077 ZX Amsterdam,荷兰,在阿姆斯特丹注册,KvK 编号 72446218。Oxera Consulting GmbH 在德国注册,编号 HRB 148781 B(夏洛滕堡地方法院),注册办事处:Rahel-Hirsch-Straße 10, Berlin 10557,德国。