XiaoMi-AI文件搜索系统
World File Search System腕肢

肢端肥大症患者诱发高血糖
pasireotide是一种用于治疗厄运病的生长抑素类似物,这是由过量生长激素引起的慢性疾病。尽管对pasireotide的治疗益处是对无法充分控制的肢端肥大的二线治疗方法,但主要关注的是其高血糖副作用。在这里,我们提供了有关如何选择适当的肢端肥大症患者进行pasireotide治疗的指导。我们总结了与pasireotide相关高血糖高风险的患者的基线特征,并建议基于风险验证的监测策略。对血糖水平(SMBG)的自我监测,禁食等离子体葡萄糖(FPG)的测量值,餐后等离子体葡萄糖(PPG)和常规的HBA1C测量值是我们建议的监测方法的基础。pasireotide诱导的高血糖的病理生理学涉及降6型激素GIP(葡萄糖依赖性胰岛素多肽)和GLP-1(甘氨酸样肽-1)的分泌降低。我们的专家建议通过建议在所有适当的患者中均可在所有适当的患者中,通过建议基于君主治疗的二肽基肽-4抑制剂(DPP-4I)(DPP-4I)(DPP-4I)(DPP-4I)(DPP-4I)(DPP-4I)(DPP-4I),以所有适当的患者在适当的患者中访问了替代人,我们的专家建议涉及基于肠血蛋白诱导的高血糖的特异性病理生理学(DPP-4I)和Glucagogon-1抑制剂(GLP-1 RA)。此外,我们强调了对肢端肥大,出色的糖尿病教育,营养和生活方式指导的充分控制的重要性,并建议在pasireotide下的高血糖患者管理中不确定性的情况下咨询专家糖尿病学家。
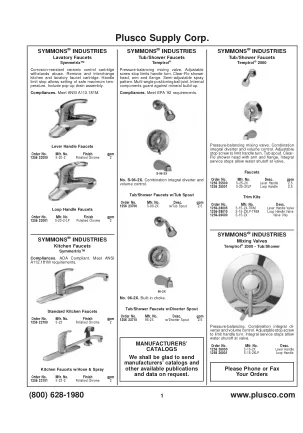
Plusco 供应公司
台面安装式水槽水龙头,中心距为 8 英寸。5 3 ⁄ 8 英寸刚性/摆动鹅颈喷嘴和 4 英寸腕式手柄。Quaturn 阀杆单元。喷嘴中的 1.6 gpm 内部流量控制和流量调节器适配器(而不是曝气器)符合大多数规范,可减少细菌生长并产生层流水,从而大大减少水溅。抛光镀铬饰面。符合 ADA 要求。

高度AV块患者的经胸蛋白心脏淀粉样变性的患病率 石墨烯 - 电解质双层的恒定化学势 - Quantum机械 - 分子动力学模拟 使用多个光学局部合作移动操纵器 基于网络切片和数字双胞胎的可自定义且可靠的机器人互联网 静止状态功能连接性MRI的定量评估 分子束外延的v> v沟硅 昆虫在人类世尼克·布Blüthgen1†,lynn v ... 中下降 基于点云断层扫描的3-D结构中有效的全球导航规划
抽象的物镜经硫代蛋白淀粉样蛋白心肌病(ATTR-CM)是由沉积野生型或突变的转染素引起的浸润性心脏疾病。作为特性疾病,我们试图确定其特发性高度心房(AV)块的患者的患病率,需要永久性起搏器(PPM)。在2019年11月至2021年11月之间,经过PPM植入PPM的70-85岁的连续患者提供了3,3-二磷酸-1,2-二磷酸-1,2-丙二烷二键二羧酸(DPD)扫描。人口统计学,合并症,心电图和成像数据。结果39例患者(男性为79.5%,设备植入76.2(2.9)年)进行了DPD扫描。3/39(7.7%,全男性)的结果与属性(佩鲁吉尼2或3级)一致。平均DPD扫描的人的最大壁厚为19.0 mm(3.6毫米),而阴性扫描的患者为11.4 mm(2.7 mm)(p = 0.06)。所有被诊断为ATTR-CM的患者患有脊柱狭窄,两名患有腕管综合征。结论应在需要永久起搏的老年患者中考虑高度AV块,尤其是在存在左心室肥大,腕管综合征或脊柱狭窄的情况下。
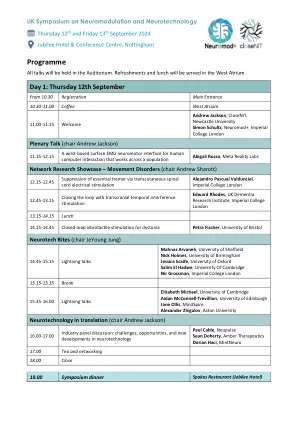
程序
Abigail Russo 是 Meta Reality Labs 的一名研究科学家,她正在研究使用非侵入式腕戴式脑机接口扩展人类运动能力的策略。她在哥伦比亚大学师从 Mark Churchland 攻读博士学位,研究了自愿运动过程中的运动皮层网络功能,借鉴了人工神经网络的见解。 演讲题目:一种适用于整个人群的人机交互腕式表面肌电图神经运动接口 描述:我们描述了一种非侵入式神经运动接口的开发,该接口允许使用表面肌电图 (sEMG) 进行计算机输入。我们开发了一个高灵敏度和强大的硬件平台,可以轻松戴上/脱下,以感应手腕上的 sEMG 并将有意识的神经运动命令转换为计算机输入。我们将此设备与一个经过优化的基础设施配对,可以收集来自数千名同意的参与者的训练数据。这使我们能够开发通用的 sEMG 神经网络解码模型,该模型具有跨人群的高性能开箱即用泛化能力(测试用户在连续导航任务中的平均性能:0.5 次目标获取/秒;离散手势检测任务:0.9 个手势/秒;手写任务:19.6 个字/分钟)。

铰接式多体飞机的建模和控制 - MDPI
摘要:昆虫利用腹部和其他附肢的动态关节和驱动来增强空气动力学飞行控制。飞行中的这些动态现象有许多用途,包括保持平衡、增强稳定性和扩展机动性。生物学家已经观察和测量了这些行为,但尚未在飞行动力学框架中很好地建模。生物附肢通常相对较大,以旋转方式驱动,并具有多种生物功能。用于飞行控制的技术移动质量往往紧凑、平移、内部安装并专用于该任务。生物飞行器的许多飞行特性远远超过任何同等规模的技术飞行器。支持现代控制技术探索和管理这些执行器功能的数学工具可能会开启实现敏捷性的新机会。本文开发的多体飞机飞行动力学紧凑张量模型允许对具有机翼和任意数量的理想化附件质量的仿生飞机进行统一的动力学和气动模拟和控制。演示的飞机模型是一架类似蜻蜓的固定翼飞机。移动腹部的控制效果与控制面相当,腹部横向运动代替气动舵以实现协调转弯。垂直机身运动实现了与升降机相同的效果,并且包括上下潜在有用的瞬态扭矩反应。当控制解决方案中同时采用移动质量和控制面时,可实现最佳性能。一架机身驱动与传统控制面相结合的飞机可以通过使用本文介绍的多体飞行动力学模型设计的现代最优控制器进行管理。
IPCD – 针对性肌肉神经支配治疗截肢疼痛 第 1 页,共 8 页
当手臂或腿部的一部分被手术切除(肢体截肢)时,肢体末端的神经会被切断。这通常会导致两种类型的持续性肢体疼痛:残肢疼痛通常由形成疼痛性良性肿瘤的神经末梢引起,或肢体被切除部分产生的幻肢痛。这些疼痛很难通过标准止痛方法治疗,有时即使接受治疗也不会消失。有针对性的肌肉神经再支配包括重新布置被切断的神经,将它们连接到附近肌肉中的其他神经(神经再支配)。该手术的目的是控制肢体截肢后的疼痛。

变化的计算
3应用29 3.1最短路径。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 3.2腕杆菌问题。。。。。。。。。。。。。。。。。。。。。。30 3.3最小表面。。。。。。。。。。。。。。。。。。。。。。。。。。。。。34 3.4革命的最小表面。。。。。。。。。。。。。。。。。。。。。。36 3.5等等不平等。。。。。。。。。。。。。。。。。。。。。。。。。。42 3.6图像修复。。。。。。。。。。。。。。。。。。。。。。。。。。。。。45 3.6.1梯度下降和加速度。。。。。。。。。。。。。。。。46 3.6.2原始双重方法。。。。。。。。。。。。。。。。。。。。。。。49 3.6.3分裂的Bregman方法。。。。。。。。。。。。。。。。。。。。。。。51 3.6.4总变异恢复的边缘保存特性。53 3.7图像分割。。。。。。。。。。。。。。。。。。。。。。。。。。55 3.7.1金茨堡 - landau近似。。。。。。。。。。。。。。。。59