XiaoMi-AI文件搜索系统
World File Search System自下而上
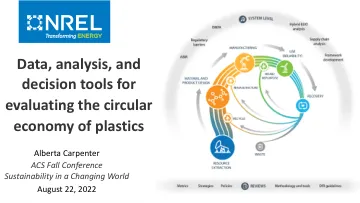
评估塑料循环经济的数据、分析和决策工具
• TEA、MFI、LCA、EEIO • 来自专利和同行评审文献的工艺数据 • 实验验证 图:(A) PET 酶解聚工艺的简化工艺流程图 (B) 自下而上的供应链模型 (MFI 工具) 范围和自上而下的环境扩展投入产出 (BEIOM 模型) 范围的表示
关于风险管理的非正式简报
•监督风险管理过程•汇总自下而上的风险概况,并准备公司风险报告,该报告借鉴了内部(审计,评估,QBR)和外部(ACO,EB,全球趋势)证据•为所有风险所有者提供技术支持,并为所有风险所有者提供技术支持


指定氮氧化物、硫氧化物和颗粒物排放控制区的提案 - 技术支持文件 (EPA-420-R-09-007)(2009 年 4 月)
本章介绍的 C3 船舶区域和国家清单是独立构建的港口和港间排放清单的总和。港口清单是为美国 89 个深水港和 28 个五大湖港制定的。2 虽然美国有 117 多个港口,但这些港口是美国货物吨位最高的港口。港口特定排放量采用“自下而上”的方法计算,使用每个港口的船舶停靠、排放因子和活动数据。港口间排放量和其余港口的排放量是使用水路网络船舶交通、能源和环境模型 (STEEM) 获得的。3,4 STEEM 也采用“自下而上”的方法,使用历史北美航运活动、船舶特征和基于活动的排放因子来估算 C3 船舶的排放量。STEEM 用于量化和地理(即空间)表示一般在美国 200 海里 (nm) 范围内航行的船舶的港间船舶交通和排放量。

光能重新激活鞭毛
能够自我维持定向运动的人工系统在开发许多具有挑战性的应用方面具有很高的兴趣,包括医疗和技术应用。在合成生物学的背景下,自下而上地组装这样的系统仍然是一项具有挑战性的任务。在这里,我们通过将光可切换的光合囊泡与脱膜鞭毛相结合,展示了人工光驱动能量模块和运动功能单元的生物相容性和效率,从而在光照时为运动蛋白分子马达提供 ATP。鞭毛推进与其拍打频率相结合,光能触发的 ATP 动态合成使我们能够根据光照控制鞭毛的拍打频率。与不同的生物构件(如生物聚合物和分子马达)相结合的光能功能化囊泡可能有助于自下而上地合成人工细胞,这些细胞能够经历马达驱动的形态变形并以光可控的方式表现出定向运动。


PCB3060 |遗传学原理| 3.00学分
1。创建一个新的部分文档和二-D素描图2。在设计意图之后,在对象上应用和编辑维度3。描述挤出基本特征和草图的特征4。演示标准组件的自下而上技术5。证明对自上而下的组装设计方法6。创建所需的图形视图以记录设计过程7。在计算机模型上进行分析并根据需要完善设计

为什么数据和分析需要多速方法
我们确实看到自上而下和自下而上在我们的客户和行业中广泛存在。这两种方式都有好处。但同时,我们也看到,这两种方式都存在一些挑战。因此,当您考虑自上而下地在整个组织范围内使用数据和分析时,可以将其想象为 CEO 和 C 级高管坚定的承诺、组织、广泛的制度化、长期愿景,然后是明确的运营模式和责任制。我们将如何推动大数字、大成果、大投资。因此,很多成果都来自于此,因为组织已经围绕这一点团结起来。这真的很好。尽管如此,有些事情会成为瓶颈。有时可能需要更长的时间。有时资金可能会成为问题。因此,我们的客户在经历自上而下和自下而上时,需要应对很多事情,有些好处是速度快,有些是敏捷,有些是敏捷,有时是有机的。这就是很多很好的观点。但是我们看到一些制约因素,可能是可扩展性问题,可能是整个组织或企业缺乏整体资金支持。也许企业领导者还没有完全接受,因为他们不知道这是否真实。这只是一个观点,一个概念证明吗?所以,当我们从上到下和从下到上看时,这些是我们必须考虑的一些事情,以及每种方式的优缺点。