XiaoMi-AI文件搜索系统
World File Search System船舶运动

扩展卡尔曼滤波器设计及船舶运动预测...
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据从全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收信号作为编码的 ASCII 字符。因此,必须使用解析器解码 AIS 语句以获得实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要特征。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引术语 — 卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面航行器、船舶
使用实时自动识别系统 (AIS) 数据进行扩展卡尔曼滤波器设计和船舶运动预测
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据由全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收编码的 ASCII 字符信号。因此,必须使用解析器解码 AIS 语句以获取实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要功能。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明了估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引词——卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面舰艇、船舶
驾驶舱运动系统 (FDMS) - CANDIS PDF 服务
简介 飞行甲板运动系统 (FDMS) 是一种主动操作员指导系统,用于在公海降落直升机时协助船上着陆安全官 (LSO)。使用现有系统和程序,直升机飞行员和 LSO 始终能够成功识别船舶横摇运动是否在安全着陆的“限制范围内”,但无法可靠地识别船舶垂直运动是否在限制范围内。FDMS 的主要功能是提供“静止期指示器”(QPI),用于识别船舶运动是否在限制范围内以及是否不在限制范围内。 结果 本报告详细记录了 FDMS 操作概念和系统参数,以建立工程规范。讨论了重要的新概念,包括如何实时量化静止期,以及哪些系统功能可用于警告操作员有关当前船舶运动的操作限制。描述了系统组件位置,并总结了操作模式。讨论了所需船舶运动参数的获取和计算,并描述了定义合适运动标准的程序。意义 提倡发展 FDMS 的主要原因是提高操作安全性和效率,但它也将为 CF 舰船上现有的许多问题提供解决方案。FDMS 将消除目前对城市级船舶运动“操作范围”的人为限制

在提及“船舶运动预测 (SMP)”软件时使用“预测”一词会造成混淆,并且目前使用时是错误的
图 1- USCG HH-52A 降落在 USCGC WESTWIND 上,1964 年 3 月 6 日(WWW . USCG . MIL)...................................- 1 - 图 2 - 标准海军气泡倾斜仪(BALL)和 HCO 的船尾视图(WWW . NAVY . MIL).............................................................................- 3 - 图 3 - 比较倾斜仪读数和 NSRDC 电子测量在飞机事件期间的极端船体横摇和纵摇(两个测量值均以双振幅给出)(BAITIS 1975) ...........................................................................................................................................................- 5 - F图 4 — LSE 向 SH-60 发出着陆信号( WWW . NAVY . MIL ).............................................................................- 6 - 图 5 — 海岸警卫队 HH65A 6571 后翻滚方位(USCG 2004).............................................................- 8 - 图 6 — 海军人员快速爬上 DDG 飞行甲板( WWW . NAVY . MIL ) .................................- 9 - 图 7 – 甲板约束系统 – 传统楔块、链条和 RAST(在直升机下方可见) (WWW. 海军. MIL) .............................................................................................................................................- 14 - 图 8 – 动态接口 (DI) .............................................................................................................................................- 21 - 图

R40 AIS 基站 - GreenFinder 亚洲
Saab TransponderTech 的 R40 基站是 IALA 定义的物理 AIS 岸站的主要组成部分。其主要目的是从在基站覆盖范围内航行的配备 AIS 的船只接收数据并向其传输数据。这样就可以高效地监控和跟踪船舶运动。R40 可以独立安装,也可以集成到网络中,例如市场领先的 Saab AIS 网络。
货物围护系统晃荡载荷和结构强度评估指南
(1) 本指南涉及 LNG 运输船中液货舱内液体和船舶运动产生的晃动载荷。本指南适用于薄膜型 LNG 运输船在晃动载荷作用下的货物围护系统的评估程序和验收标准。 (2) 此外,本指南还适用于《钢质船舶入级规范》(在本指南中以下简称“规范”)第 13 篇第 1 节第 4 章第 6 节适用范围以外的带液货舱船舶的晃动载荷计算程序。 (3) 本指南适用于采用薄膜技术的海上 LNG 储存和再气化结构的货物围护系统的晃动载荷和结构强度评估程序。 (4) 本指南的要求应与规范的其他要求一起适用。
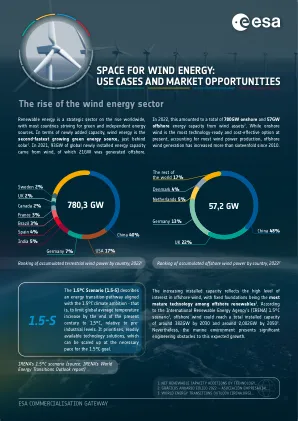
风能空间:使用案例和市场机会
由于密集的研发活动,欧洲不断推出风力发电创新技术。例如,正在开发的浮动风力涡轮机提供了更大的灵活性,可以根据风向和船舶运动移动装置,同时避免高昂的基础安装成本。它们还可以进入更深的水域,而不会对海洋生物产生重大影响。垂直叶片也在开发中,尽管它们的性能较低,但也开辟了新的机会——它们不需要定位系统,而且它们的发电机可以位于更方便的区域,从而降低维护成本。城市风能正在接受测试,因为垂直涡轮机不需要很高的高度,因此更适合城市环境。空中风能系统也在探索中。与此同时,传统的风力涡轮机的高度一直在增加,以便捕获更多的能量并提高成本效益 8 。研究