XiaoMi-AI文件搜索系统
World File Search System行器


信任行
- 在雇主或各个组织部门进行内部调查,并联系有关人员和工作部门 - 向您联系其他主管机构, - 出于缺乏证据或其他原因停止诉讼程序,将案件移交给我们的内部调查部门或主管当局进行进一步调查。您的报告将由负责人根据双重控制原则评估。负责机密办公室的人员是来自INGKA集团People&Culture或INGKA集团业务风险与合规性的专门培训和任命的同事。如有必要,您的案件将被送往信托行的负责人,他们将采取进一步的行动。如果您报告的事件不属于信托行的管辖范围,我们将告知您可以与谁联系。我们建议您定期使用案件编号登录信任线的系统,因为我们可能会问您更多问题或询问有关报告的重要信息。4。谁会处理我的案子?信任线将在处理案件的处理中尽可能少。所有分配给案件的同事均经过专门培训并与机密性约束。这些是最初可以访问报告给信托行的案件的唯一宜家同事。您的报告和您的身份(如果您已经披露)将被转发给信托行的负责人。如果有进一步的调查,此信息也将发送给负责处理您的案件的人。5。6。组织中指定的进一步调查或行动工作的人员至少比报告事件的人高一个级别。我可以在以后提供更多信息吗?在信任线负责的人可能会提出其他问题。这些问题将为您存储在信任线的系统中。您可以使用您的案例编号来检索它们。您可以通过与事件报告相同的报告渠道提交答案。为了避免虚假指控和相应的调查,我们建议不要匿名报告。我们建议您始终在事件报告中提供您的名字和姓氏。我们将采取所有必要的措施来保护您的身份。我将如何知道我的案件的进度?已向信托行报告事件后,将为您分配一个案例号。我们将通知您此案编号。您可以随时登录信任行系统,以访问您的报告和进一步的通信。
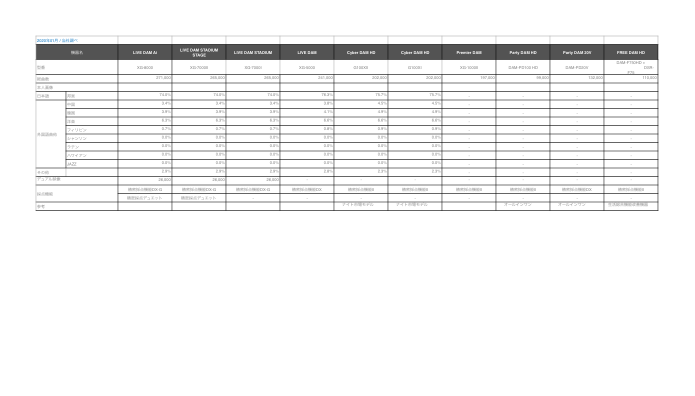
2020 年 1 月 / 根据我们的研究,设备名称为 LIVE DAM Ai...
舞台现场 DAM 体育场现场 DAM Cyber DAM HD Cyber DAM HD 首映 DAM 派对 DAM HD 派对 DAM 20V 免费 DAM HD

空调设备维修及检测服务(通讯站)
(8)其他 a. 如果需要重新投标,将立即进行。但是,如果通过邮寄投标,则投标将于 2024 年 7 月 31 日星期三下午 1:15 执行。 (一)邮寄投标:将投标表放入写有标题的小信封内并密封。然后将此表和资格审查结果通知书副本放入标有“(投标标题)附有投标表”的信封内,并通过挂号信(简单挂号信也可以)于 2024 年 7 月 25 日星期五下午 5 点之前寄送至第 324 会计中队承包团队。在这种情况下,请拨打下面列出的人员以确认消息已到达。 如需重新投标,投标必须于 2024 年 7 月 30 日星期二中午之前到达第 324 会计中队承包团队。 双方当事人签字、盖章即为合同成立。但中标人收到通知后,可不再签订合同。 如果您代表他人竞标,则必须提交授权委托书。 有关招标的询问:1016 Shukuume,Chitose,Hokkaido,066-8577,日本地面自卫队,Higashi Chitose Garrison,第324会计单位,合同部分(联系:Kobori:Kobori:Kobori)日本的Higashi chitose Garrison地面自卫力量(联系:KIDO),电话:0123-23-5131(分机3324)(9)公告的地点和期间发布:(a)发布的地点:(a)Higashi-Chitose,Higashi-Chitose,Sapporo,Sapporo和Shimamamatsu Garrison Carking tobles tobles toble toble norder corment B. ,2024年7月12日 - 2024年7月26日,星期五

Promega 2025-2026设备目录
尺寸(W X H X D)37.3 cm x 47.7 cm x 53.3 cm重量28 kg电源(功率消耗)100-240 V AC,50/60 Hz样品容器幻灯片,微型室,35毫米,35毫米,6,12,24,24,24,24,24,96 75 NA,1毫米WD系统放大倍率10.3x传感器和像素尺寸CMOS,7百万像素,冷却温度-25°C,低噪声,量子效率70%以上,像素尺寸:4.5 µm x 4.5 µm,最大曝光时间为60分钟的像素大小:2200×2200像素,4.5 µm x 4.5 µm像素像素大小最大视野:1.4 mm x 0.95 mm x 0.95 mm分辨率限制环境控制功能选项:舞台顶室,混合气体控制器

表格 1040ME,附表 A,第 7 行和第 19 行其他税务...
15. 雇主对家庭和医疗假的抵免。(附上工作表。)......................................................................................15. 16. 雇主对志愿消防员和志愿市政紧急医疗服务人员的抵免。(附上工作表。)......................................................................................16. 17. 其他不可退还税收抵免总额(将第 6 行至第 16 行相加,并在此处和 1040ME 表格附表 A 第 19 行输入总额).............................................................................17.
日本陆上自卫队和歌山驻地的开放式对抗体系......
2024年7月1日——......未经国防部批准不得进行。本协议终止后亦同。 4.3 设备、机械和消耗品。加工所需的设备、机械和消耗品在采购说明中规定。
