XiaoMi-AI文件搜索系统
World File Search System裁剪
土壤微生物生物量和细菌多样性通过稻 - 鱼共培养中的休耕覆盖
摘要:传统的大米生产通常取决于在单一种植系统中使用密集投入的不可持续的实践。替代品休耕地覆盖种植和米鱼共培养(RFC)提供有希望的解决方案。然而,RFC中休耕覆盖作物的潜力仍未得到充实,并且对土壤微生物的影响很少。在这项研究中,对土壤 - 植物 - 微生物相互作用进行了评估:中国牛奶效率(阿斯特拉加罗斯·西尼科斯·L。)单裁剪(cm),菜籽(CM),菜籽(Brassica napus L.)单裁剪(RP),以及中国奶奶酪和菜籽的组合和中国牛奶的组合(CM cm__rp)。在添加氮(N)的情况下对这些系统进行了评估,其中包括RFC和水稻单一培养(RMC)系统。发现表明用CM的土壤微生物生物量氮(MBN)显着增加。土壤微生物生物量碳(MBC)受N-肥料的影响比农作物物种更大,随着n添加而减少。在RFC系统中,土壤细菌共发生网络表现出更多的连接,但负面的联系增加了。cm_rp显示与无n的CM相似性,但随着n的添加而移到RP。n在间隔中的添加显着增加了锡霉菌曲霉的根比(r/s),与地上生物量减少和总根长有关。与RMC相比,RFC和N添加的RFC降低了CM中厌氧酸酯的相对丰度,同时增加了覆盖裁剪系统的芽孢杆菌和pontibacter。总体而言,随着N的添加,RFC和RMC均显示出土壤细菌多样性指数降低。土壤细菌多样性的变化与土壤MBC,MBN和植物R/S显着相关。连续的休耕地覆盖农作物改变的土壤微生物生物量和影响覆盖作物生物量分布,影响稻田中的细菌成分。这些结果阐明了细菌群落如何对RFC和RMC系统中的n个添加和休闲覆盖种植的反应,从而为稻谷系统中的可持续营养管理提供了见解。

临床数据仓库的大脑T1加权磁共振图像的自动质量控制
图1:来自临床数据仓库和Correponding标签的T1W脑图像的示例。a1:质量高的图像(第1层),没有gadolinium; A2:质量高(第1层),带有Gadolinium; B1:中等质量(第2层),没有Gadolinium(噪声1级); B2:中等质量(第2层),带有Gadolinium(对比1级); C1:不良质量(第3层),没有gadolinium(对比2级,运动2级); C2:不良质量(第3层),gadolinium(对比2级,运动级1级); D1:笔直排斥(分段); D2:直接拒绝(裁剪)。

v 在工作相关情境中使用生成人工智能 (AI) 的指南针
如果使用生成式人工智能工具生成文本、图像等,则必须至少向外界披露这一事实,例如在相应文本的脚注中、在图像标题或电子邮件签名中。但是,添加披露使用人工智能的注释并不意味着创建或签署文档的人不再对内容负责。但是,如果您只是修改了现有内容而不是添加新内容,则无需披露人工智能的使用,例如拼写检查器、翻译程序、文本摘要、电子邮件文本元素或借助人工智能裁剪的照片。

“使用太空技术对迈索尔·塔鲁克(Mysore Taluk)的森林和农业部门的影响及其对森林和农业部门的影响”
摘要通过使用遥感技术来评估迈索尔·塔卢卡(Mysore Taluka)的水资源,土壤水分以及植被指数进行了一项研究。研究区域位于12.630°N的纬度和76.607°E的纬度之间,涵盖了约79,788公顷的面积。土地使用和土地覆盖(LULC)地图是从Landsat图像和地面真相结合使用的。也尝试找出与气候参数有关的LULC和温度对农业的影响。使用Landsat图像使用用于分析NDVI,NDWI和NDMI图。相反,使用相对湿度,土壤水分,太阳辐射和水径径的数据进行NCEP重新分析。该研究的结果表明,年度最高温度从2000年到2016年升高,而在此期间,年度最低温度和年降雨量减少。2000-2016的NDVI分析表明它是增加的。在NCEP重新分析的情况下,在此期间的相对湿度,土壤水分和水径流的年平均值中观察到降低。年度太阳辐射也显示出增加。发现在迈索尔·塔鲁克(Mysore Taluk)减少了用于谷物,小米,豆类,油种子,棉花和粒土植物的裁剪区域。另一方面,迈索尔·塔卢卡(Mysore Taluka)的水果,蔬菜和甘蔗的裁剪区域显示出来。GCM模型的C-MMAC预测,迈索尔·塔卢克(Mysore Taluk)分别降雨和2020年和2030年的温度下降。关键词:土地使用和土地覆盖,归一化差异植被指数,NCEP重新分析和MODIS数据。

使用基于YOLO的学习方法
摘要 - 在农业工业化的目的中,对通常栽培作物的作物收获过程的优化至关重要。如今,机器视觉的利用使农作物的自动鉴定可以提高收获效率,但仍然存在挑战。 本研究提出了一个新的框架,该框架结合了两个单独的卷积神经网络(CNN)的架构,以便同时完成模拟环境内的作物检测和收获(机器人操纵)的任务。 模拟环境中的作物图像受到随机旋转,裁剪,亮度和对比度调整,以创建数据集生成的增强图像。 只有一旦使用传统的矩形边界框(R- Bbox)来进行农作物定位,您只能看一下算法框架。 随后提出的方法通过视觉几何组模型利用了获得的图像数据,以揭示机器人操纵的抓地位置。 索引术语 - 深度学习,Yolov3密集,机器人抓紧。如今,机器视觉的利用使农作物的自动鉴定可以提高收获效率,但仍然存在挑战。本研究提出了一个新的框架,该框架结合了两个单独的卷积神经网络(CNN)的架构,以便同时完成模拟环境内的作物检测和收获(机器人操纵)的任务。模拟环境中的作物图像受到随机旋转,裁剪,亮度和对比度调整,以创建数据集生成的增强图像。只有一旦使用传统的矩形边界框(R- Bbox)来进行农作物定位,您只能看一下算法框架。随后提出的方法通过视觉几何组模型利用了获得的图像数据,以揭示机器人操纵的抓地位置。索引术语 - 深度学习,Yolov3密集,机器人抓紧。

2012年,我遇到了一个叫卡佩贾的女孩,她因左腿罹患怪病而被家人遗弃,右腿也受到侵袭,在TLM 刚果的支持下,双腿被截肢。我通过将她与家人联系起来对这个女孩进行指导,然后鼓励她不要担心,并进行自我护理以治愈她的足部溃疡。我给了他一笔小额贷款,用于出售玉米粉、木薯、棕榈油和房前余烬。这使他能够获得每日的食物。我送他去职业培训中心接受裁剪和缝纫培训。如今,她已经成为村里炙手可热的裁缝。如今,她过着正常的生活,并能满足基本的社交需求。
2012年,我遇到了一个叫卡佩贾的女孩,她因左腿罹患怪病而被家人遗弃,右腿也受到侵袭,在TLM 刚果的支持下,双腿被截肢。我通过将她与家人联系起来对这个女孩进行指导,然后鼓励她不要担心,并进行自我护理以治愈她的足部溃疡。我给了他一笔小额贷款,用于出售玉米粉、木薯、棕榈油和房前余烬。这使他能够获得每日的食物。我送他去职业培训中心接受裁剪和缝纫培训。如今,她已经成为村里炙手可热的裁缝。如今,她过着正常的生活,并能满足基本的社交需求。
国家农业和农村发展银行...
生态及其与人,自然资源,其可持续管理和保护的相关性。物理和社会环境是农作物分布和生产的因素。农业生态学;裁剪模式作为环境的指标。环境污染以及对农作物,动物和人类的危害。气候变化 - 国际公约和全球倡议。温室效应和全球变暖。生态系统分析的高级工具 - 遥感(RS)和地理信息系统(GIS)。该国不同农业气候区的种植模式。高田和短期品种对裁剪模式转移的影响。各种种植和农业系统的概念。有机和精确耕作。生产重要谷物,豆类,油籽,纤维,糖,商业和饲料作物的实践包装。各种类型的林业种植园的重要特征和范围,例如社会林业,农业森林和天然林。森林植物的传播。森林产品。农业林业和增值。保护森林动植物和动植物。杂草,它们的特征,传播和与各种作物的关联;它们的乘法;杂草的文化,生物学和化学控制。土壤 - 物理,化学和生物学特性。土壤形成的过程和因素。印度土壤。土壤的矿物质和有机成分及其在维持土壤生产率中的作用。生物肥料。土壤和植物中必不可少的植物营养和其他有益元素。土壤生育能力,土壤测试和肥料建议,综合养分管理的原则。土壤中氮的损失,淹没的水稻土壤中的氮利用效率,土壤中的氮固定。有效的磷和钾的使用。问题土壤及其填海。影响温室气体排放的土壤因素。土壤保护,综合流域管理。土壤侵蚀及其管理。干地农业及其问题。稳定雨水区农业生产的技术。与作物有关的水效效率
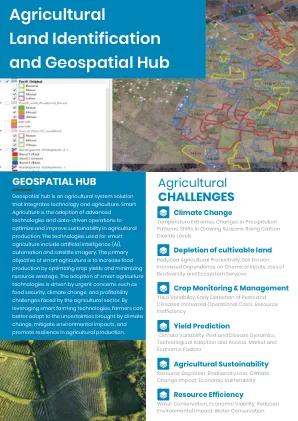
农业土地识别和地理空间中心
卷积神经网络(CNN)是一种可以有效地从卫星图像中学习和提取空间特征的体系结构。它们由过滤器(也称为核)组成,这些过滤器(也称为内核)在输入图像上滑动,提取本地特征。这些过滤器学会检测模式,例如边缘,角落和纹理。随着我们更深入网络,这些过滤器变得更加复杂,学习复杂的层次结构特征。网络深度已被有目的地优化,以捕获低级和高级功能。分类过程是通过最初利用CNN的功能来区分的:(a)裁剪土地(b。)结构(c。)森林(d。)水。预计该地区的性质将在耕种期间保持恒定,因此在季节性进行面积检测。
消防喷淋计划提交要求
许可证申请 执照副本 平面图,比例不小于 1/8” 图例显示现有、重新安置的附加或堵塞的头或管线设备。为每个新设备或设备裁剪图纸。指明服务区域的危险类型。平面图审查过程可能需要长达 10 个工作日。不完整的平面图可能需要重新提交。需要进行系统验收检查,并应在要求的检查时间前至少 24 小时进行。对于不完全符合所有适用规范的系统,将收取 15 美元的重新检查费。所有设备都将以批准的方式进行测试。安装/修改许可证和一套批准的平面图应保留在工作现场,并在检查员要求时提供给他们。