XiaoMi-AI文件搜索系统
World File Search System裸腿
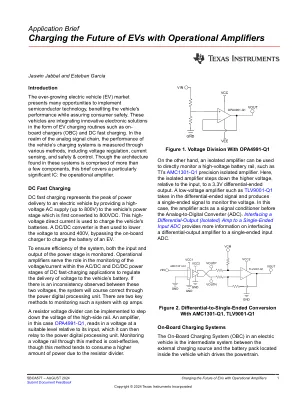
用操作放大器向HEV/EV的未来充电
监视每个单独的逆变器腿使用低侧电流传感拓扑,而无需隔离放大器就可以完成,因为每条腿的共同模式电压接近零。有三种方法可以实现低端电流感应。一,二或三转的拓扑。虽然单次测量技术趋向于更高的带宽要求,但三转解决方案要求较低的速度,通用物质放大器(例如TLV9061-Q1),因为您能够单独监视每条腿。在OBC系统中准确的电流传感的一项重要要求是确保定居时间尽可能短,这就是为什么建议将TLV9061-Q1(10 MHz Unity增益宽宽放大器(1 µs沉降时间))以使该应用程序快速响应电流的变化。
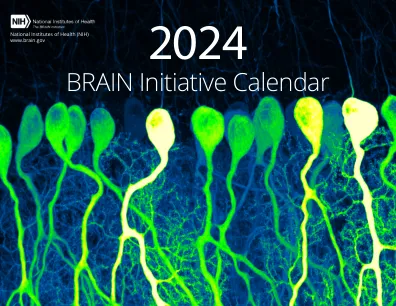
2024大脑倡议日历
控制果实腿的前前神经元的重建。使用果蝇腹神经线超薄部分的电子显微镜数据集,研究人员生动地显示了涉及的神经连接涉及的腿运动。每个神经元的结构有助于研究者确定其发育谱系,以不同的颜色为代表。这项脑资助的工作代表了第一个全面分析
x 奖项团队总结 - 商业空间维基
Lucky Seven 将是一枚长 9 米、翼尖间距 3 米的锥形火箭。在发射和着陆时,火箭将由四个固定的腿翼支撑,每个腿翼高 5 英尺。这些腿是支撑推进系统、加压舱和鼻锥/回收系统的金属框架的一部分。垂直发射时,主发动机将燃烧 90 秒,之后火箭将在 100 公里高度标记后继续滑行 100 秒。乘客将体验大约三分半钟的失重状态 - 从发动机关闭到火箭重新进入大气层。重返大气层后,将展开减速伞以减缓上升速度。当空气变稠时,将展开翼伞。然后,航天器将使用全球定位系统卫星导航系统返回发射场,滑行至垂直着陆。
2024 年英国生物奥林匹克竞赛试卷 1 和 2
第 1 部分(共 6 部分) *Cataglyphis fortis* 是一种生活在突尼斯沙漠的蚂蚁。科学家研究了蚂蚁的导航方式。他们抓到正在返回巢穴的蚂蚁,要么剪掉它们的腿的末端(左),要么给它们装上支柱(中),要么让它们保持原样(右),然后再将它们放回原处。*C. fortis* 的腿长超过巢穴。*树桩长低于巢穴。*腿正常的蚂蚁成功找到了巢穴。

薄壁产品激光定向能增材制造中基体结构对残余应力影响的数值研究
摘要:提出一种基于制造约束和基体设计的激光定向能量沉积增材制造(DED AM)产品残余应力控制新方法。残余应力的模拟结果与实验测量数据进行了验证。结果表明,减弱基体上的约束可以大大降低激光DED AM产品中的残余应力。此外,通过在基体上设计局部减薄区域,如长条形孔或支撑腿,可以进一步降低DED AM产品的残余应力。在本研究中,当基体上设计长条形孔时,拉残余应力降低了28%。当设计结构改为支撑腿时,残余应力更小。拉残余应力降低了30%以上。支撑腿越少,残余应力越小。DED AM产品的残余应力可以通过设计得到很好的控制,同时可以通过减少约束来削弱刚度。