XiaoMi-AI文件搜索系统
World File Search System视觉系统

飞秒激光微加工的发展...
Kirana 工厂由不同实验室中的多个微加工平台组成。Kirana 技术人员可以完全控制这些平台,从而实现极大的灵活性,以满足客户的要求。微加工装置配备了不同的激光源,从纳秒到飞秒不同波长的激光,以及用于在线检查的可定制视觉系统

一切 - max-ai.com
Max-AI® VIS(视觉识别系统)可实时识别可回收物,是一种经济高效的监控整个系统材料成分的方法。Max-AI 技术采用视觉系统和多层神经网络来观察和识别物体,其方式与人类相似。Max-AI VIS 可用于验证最终产品的质量,或分析离开系统时的残留物。

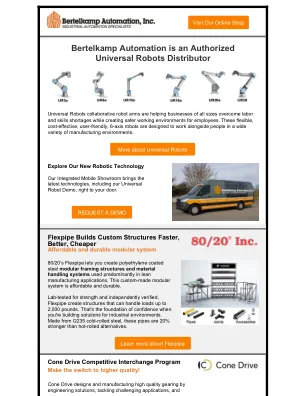
Bertelkamp自动化是授权的通用...
Bertelkamp Automation结合了我们在机器视觉和最先进的视觉实验室中的丰富经验,以帮助您充满信心,以推动项目前进。我们的应用工程师团队可以为您提供实际数据,以确定视力指导,检查,自动标识或计量应用程序的可行性。我们利用了各种可用的灯光,镜头,2D或3D视觉系统和软件来执行这些可行性研究。

人工...
摘要:本文重点介绍了深度学习和计算机视觉技术集成的应用效果的分析。深度学习通过构建等级神经网络,实现端到端特征学习和对图像的语义理解,从而实现了历史性的突破。在计算机视野领域的成功经验为培训深度学习算法提供了强有力的支持。这两个字段的紧密整合已引起了新一代的高级计算机视觉系统,在机器视觉图像分类和对象检测等任务中大大超过了传统方法。在本文中,典型的图像分类案例被合并,以分析深神经网络模型的出色性能,同时还指出了它们在概括和可解释性方面的局限性,并提出了未来改进的方向。总体而言,深度学习与大量视觉数据的有效整合和发展趋势将继续推动计算机视觉领域的技术突破和应用扩展,从而有可能构建真正智能的机器视觉系统。这种加深的融合范式将在计算机视觉中有力促进前所未有的任务和功能,从而为相关学科和行业提供更强的发展势头。
智能机器人系统和行业4.0
“机器人系统及其应用的一般视野;机器人类型(工业操纵者;工业机器人;人形机器人;陆生机器人;水生机器人;飞行机器人);末端器官(机械,气动,气动,磁性,磁性,人造肌肉);机器人和传感器体系的传感器(传感器的传感器)(传感器的传感器(传感器)(传感器)(传感器)(传感器)传感器,基于视觉系统);

使用闪烁的 LED 灯通过视觉系统刺激伽马脑波:优化阿尔茨海默氏症的潜在治疗方法 Meredith W. Hillier,N
使用闪烁的 LED 灯通过视觉系统刺激伽马脑波:优化阿尔茨海默氏症的潜在治疗方法 Meredith W. Hillier,华盛顿州贝尔维尤纽波特高中:meredithwh13@gmail.com 摘要 最近使用小鼠阿尔茨海默氏症模型进行的研究表明,以 40 Hz 的频率诱发伽马脑波会导致脑中的小胶质细胞清除斑块形成蛋白,从而真正治疗疾病,而不仅仅是治疗症状。 在我的研究中,设计并构建了脑电图 (EEG) 设备和闪烁的 LED 灯电路,以测试如何最好地在人脑中诱发伽马波。 使用快速傅里叶变换分析数据。 测试了 9 名成年人,年龄从 18 岁到 90 岁不等,其中包括一名阿尔茨海默氏症患者。 每个受试者都很容易诱发 40 Hz 脑波。 在刺激期间,在 30、35 和 40 Hz 时,测试频率的脑波出现显著峰值。在打开灯但用纸板挡住的对照试验中没有检测到任何反应,表明这种效果不是由于电子串扰伪影造成的。这种效果在 45 Hz 时很弱,在 50 Hz 时不存在。响应在 50% 占空比时最强。偶尔在 20% 和 80% 时没有响应。响应随着亮度而增加。然而,偶尔在低亮度下会有强烈的反应,尤其是在老年受试者中。红色和白色比绿色效果更好,比蓝色好得多。一个受试者通常在刺激频率的一半时有反应,这意味着神经元对其他所有光刺激都有反应。这项研究为如何最好地在人类中诱导 40 Hz 伽马脑波以潜在治疗阿尔茨海默病提供了指导。 1 简介 2016 年对一种遗传上具有阿尔茨海默病风险的小鼠进行的一项最新研究表明,诱导伽马脑波可刺激大脑中的小胶质细胞清除与阿尔茨海默病相关的β淀粉样斑块。这是一个非凡的发现,因为它表明诱导伽马脑波可以治疗阿尔茨海默病,而不仅仅是治疗其症状。人体临床试验目前正在进行中,但尚未公布结果。
研究人员发现,人工智能在预测脑转移结果方面比人眼更好
Sadeghi-Naini 解释说:“当你看 MRI 时,你会看到肿瘤内部或周围的区域,这些区域的强度和模式不同,因此你会更多地用视觉系统关注这些部分。但人工智能算法却对此视而不见。我们在算法中融入的注意力机制可帮助这些人工智能工具了解这些图像的哪些部分更重要,并在分析和预测时更加重视这些部分。”
视觉集成导航系统,用于在 GNSS/SBAS 或 ILS 发生故障时进行飞机最后进近
本文提出了一种视觉集成导航系统,用于引导飞机在最终下滑道上滑行。该系统利用机载视觉系统跟踪跑道特征并估计飞机相对于着陆跑道的 6D 姿态。如果 ILS 或 GNSS/SBAS 传感器性能下降或出现故障,所提出的视觉集成导航系统将允许飞机继续执行最终进近程序,并保持导航精度。为了处理由于图像处理时间而导致的此类基于视觉的测量不可忽略的延迟,建立了一个包含时间延迟测量的误差状态卡尔曼滤波器 (ESKF) 框架。所提出的延迟测量 ESKF 框架利用了这样一个事实:摄像机图像采集由系统触发,因此可以无延迟地通知。这使得导航滤波器能够及时向前执行估计状态的反向传播,以便在测量可用时为未来的校正步骤做好准备。基于此框架的视觉集成导航系统已开发出来,并在模拟中验证了其功能。其估计性能将通过固定翼无人机实验平台上的两种不同视觉系统进行飞行评估。