XiaoMi-AI文件搜索系统
World File Search System视觉范围

健康学者杂志第5卷,第4卷
1顾问科科医生省级医院巴达拉,斯里兰卡2顾问皮肤科医生省级医院巴达拉,斯里兰卡通讯作者:erandamailbox@gmail.com中央视网膜静脉闭塞(CRVO)是由全球视觉上的视觉范围造成的重要原因,造成了视觉范围的重要原因,并在世界范围内进行了视觉范围,并导致了视觉范围内的视觉范围,并导致了视觉范围内的封闭式范围。损害。病理生理学涉及静脉充血和视网膜毛细血管渗透性增加,如果未迅速解决,可能会导致永久性损害。尽管CRVO主要与全身状况有关,例如高血压,糖尿病和高凝性,但最近的观察结果表明与COVID-19-19疫苗接种相关,尤其是在具有潜在危险因素的个体中。鉴于全球Covid-19疫苗的广泛施用,了解潜在的眼部并发症对于知情风险效益分析和患者管理至关重要。COVID-19疫苗接种后描述视网膜血管事件的稀有报告的出现引发了有关疫苗在触发或加剧CRVO等条件中的作用的问题。这些病例通常涉及各种Covid-19-19疫苗,包括基于媒介的疫苗和mRNA疫苗,通常在疫苗接种后几天至几周内报告。将COVID-19疫苗与CRVO联系起来的潜在机制包括免疫 -

策略:inter-...
合作多代理增强学习(MARL)中的“视力范围难题”提出了一个重大挑战:有限的访问性阻碍团队的协调,而广泛的视线范围会导致注意力分散注意力和绩效下降。虽然通讯可以潜在地解决这个问题,但现有的方法通常很难跨越不同的视觉范围,从而限制了它们的有效性。我们提出了策略,任务不合时宜的对比前训练策略间互动。策略是一种自适应沟通机制,即使执行过程中的视线范围与训练中的视线范围大不相同,也可以增强代理坐标。通信机制编码消息并将其与本地观察结果集成在一起,并使用对比度学习以基于全球状态的产生表示形式。通过学习生成和解释有关整个环境重要信息的信息,策略使代理商能够通过交流有效地“看到”更多的信息,无论其视觉范围如何。我们在各种情况下,在各种情况下对SMACV2基准进行了全面评估。结果表明,战术始终优于传统的最先进的MARL技术,而没有通信,而在训练中尤其是在极限有限或广泛的观察性的情况下,对视力范围有所不同。

Computer™&Workspace™-Shamir
Shamir Computer™ / Workspace™镜头旨在显着提高15英寸至5英尺或10英尺范围内的视觉清晰度和舒适性。Shamir Computer™和Workspace™镜头功能配置文件唯一针对近视区域进行了优化。适用于小型,封闭的工作区,Shamir Computer™提供了15英寸至5英尺范围内的视觉清晰度和舒适性,通常需要方便阅读和计算机使用。Shamir Workspace™提供了类似的功能,同时扩展了较大的办公室和开放空间的视觉范围,并在更大的距离内提供视觉舒适度,最多可达10英尺。这两个镜头都适合最自然和最符合人体工程学的姿势,有助于减少向前或向后倾斜头的需求,或者降低或抬起物体以实现方便的观察。

1-x} {\ rm sr} _x {\ rm cufeo} _5 $ liaed perovskites
摘要。对于一系列应用,例如现在施放或处理大型降雨集合以进行不确定性分析,快速的城市植物浮动模型是必需的。 数据驱动的模型可以帮助克服传统流量模拟模型的漫长计算时间,而最先进的模型已显示出有希望的准确性。 然而,由于城市流量映射所需的细分解决方案,数据驱动的城市浮游模型的普遍性对于看不见的降雨和明显不同的地形,仍然限制了他们的应用。 这些模型通常采用基于补丁的框架来克服多个瓶颈,例如数据可用性,计算和磁性约束。 但是,这种方法不包含围绕小图像贴片的地形的上下文信息(通常为256m×256m)。 我们提出了一个新的深度学习模型,该模型维持了局部斑块的高分辨率构成,并结合了更大的环形区域,以增加模型的视觉范围,以增强数据驱动的UR-ban Pluvial pluvial流量模型的普遍性。 我们以1 m的空间分辨率在苏黎世市(瑞士)培训并测试了该模型,在5分钟的时间分辨率下进行了1小时的降雨事件。 我们证明,我们的模型可以忠实地代表各种降雨事件的浮游深度,高峰降雨强度范围为42.5至161.4 mmh -1。 然后,我们在不同的城市环境中,即卢塞恩(瑞士)和新加坡,在不同的城市环境中提出了模型的地形概括。快速的城市植物浮动模型是必需的。数据驱动的模型可以帮助克服传统流量模拟模型的漫长计算时间,而最先进的模型已显示出有希望的准确性。然而,由于城市流量映射所需的细分解决方案,数据驱动的城市浮游模型的普遍性对于看不见的降雨和明显不同的地形,仍然限制了他们的应用。这些模型通常采用基于补丁的框架来克服多个瓶颈,例如数据可用性,计算和磁性约束。但是,这种方法不包含围绕小图像贴片的地形的上下文信息(通常为256m×256m)。我们提出了一个新的深度学习模型,该模型维持了局部斑块的高分辨率构成,并结合了更大的环形区域,以增加模型的视觉范围,以增强数据驱动的UR-ban Pluvial pluvial流量模型的普遍性。我们以1 m的空间分辨率在苏黎世市(瑞士)培训并测试了该模型,在5分钟的时间分辨率下进行了1小时的降雨事件。我们证明,我们的模型可以忠实地代表各种降雨事件的浮游深度,高峰降雨强度范围为42.5至161.4 mmh -1。然后,我们在不同的城市环境中,即卢塞恩(瑞士)和新加坡,在不同的城市环境中提出了模型的地形概括。该模型准确地识别了水积累的位置,与其他深度

沉浸式集体觅食中社会和社会学习的自适应机制
人类认知的区别是我们适应不同环境和环境的能力。然而,在单独的社会和社会环境中,主要研究了推动适应性行为的机制,其集成框架仍然难以捉摸。在这里,我们在虚拟的Minecraft环境中使用集体觅食任务来整合这两个领域,通过利用视觉范围数据的自动转录与高分辨率的空间轨迹相结合。我们的行为分析同时捕获了社交互动的结构和时间动力学,然后使用计算模型直接测试这些模型,从而依次预测每个觅食决策。这些结果表明,社会觅食和选择性社会学习的适应机制都是由个人觅食成功(而不是社会因素)驱动的。此外,这是适应性的程度(无论是社交学习还是社会学习),它可以最好地预测个人表现。这些发现不仅融合了跨社会和社会领域的理论,而且还为人类决策在复杂而动态的社会景观中的适应性提供了关键的见解。
THENEBRASKA专业
Technical Skills Structural • Software: Revit, AutoCAD, L-Pile, RAM Structural System, Bluebeam Revu, Enercalc, MasonryIQ, RISA Systems, Excel • Gravity, lateral, and foundation system selection and design • Foundation load transfer, structural redundancy, and system evaluation • Steel, concrete, timber, and masonry design • Impact-resistance per ICC-500 and FEMA P-361 • Safe room design机械•软件:Trane Trace 700,Revit/Bim 360,Bluebeam Revu,GSHP地热顾问,气候顾问,VA设计•地热设计,地板空气分布和冰冷的光束系统•通风实践•通风实践••多端口管道设计•Multi-Entrance Plumbing Design Skm Powertools,3DS Max,Rhino 3D,Bluebeam Revu,气候顾问,SAM,ENSCAPE•电力系统和分销设计•紧急电源备份•可再生,可持续和现场生成•现场生成•照明设计•日光照明分析和设计•电视连接,火灾警报,安全性,安全性,浏览/视觉范围•电脑/视觉保护系统

虎式飞机的控制系统开发和飞行测试...
在支持感兴趣区域上空的任务时,需要为当前和未来武装直升机的传感器操作员提供高分辨率视频图像。传感器操作员需要看到主平台视觉范围以外的物体,观察天气变化,并监控多个地理上分离或分散的目标。Lite Machines Tiger Moth UAV 旨在满足这一需求。本文介绍的工作目标是通过控制系统建模、优化和飞行测试来改进 Tiger Moth UAV 的内环控制律。进行了实验室测试以确定飞机传感器和伺服动力学。从有人驾驶的频率扫描中开发了裸机身悬停/低速动力学模型。将识别的组件和动力学模型与控制律的 Simulink ® 表示相结合,形成经过验证的分析模型,该模型在 CONDUIT ® 中用于优化姿态环反馈增益。优化增益后的飞行测试显示性能有所提升。最后,在 2011 年 12 月于印第安纳州阿特伯里营进行的无绳飞行测试中,美国空军获得了改进效果。
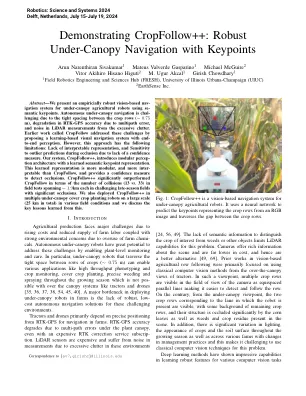
使用关键点的稳定不足导航
摘要 - 我们提出了一种基于稳固的视觉范围,用于使用Sepantic Kepoints的囊室不足农业机器人。自主态下导航由于作物行之间的紧密间距(〜0。75 m),由于多径误差而导致的RTK-GPS精度降解,以及从过度混乱中的LiDAR测量中的噪声。早期的工作称为crogfollow,通过提出具有最终感知的基于学习的视觉导航系统来解决这些挑战。然而,这种方法具有以下局限性:由于缺乏置信度措施而导致的遮挡过程中缺乏可解释的表示以及对异常预测的敏感性。我们的系统Cropfollow ++,以学习的语义关键点表示,引入了模块化感知体系结构。这种学习的表示形式比Cropfollow更模块化,更可靠,并且提供了一种置信度措施来检测闭塞。cropfollow ++在涉及碰撞的数量(13 vs. 33)的现场测试中,跨越〜1的碰撞数量显着超过了cropfollow。在挑战性的后期田野中,各有9公里。我们还在各种野外条件下大规模覆盖了多个囊性播种机器人的cropfollow ++,并讨论了从中学到的关键经验教训。

关于互感的感觉与高...
摘要:背景:互感信息在建立高阶认知体表象(BR)中起着关键作用,神经心理学和神经影像学证据归类为面向动作的(即身体架构)或非行动方向的(即视觉范围)。这项研究旨在探索BR的发展,考虑到与整个生命周期中的感知性敏感性的关联。方法:两百三十一位健康的参与者分为五个年龄段(7至8岁; 9至10年; 18至40岁; 41至60岁; 60岁以上)完成了对互感的自我报告衡量的衡量标准(自我意识问卷; SAQ),并给出了两个BR的任务(对两个BR的任务(行动范围):交通工具:交通工具:交通话之:任务;任务任务;结果:儿童(7-8岁和9-10岁)和老年人(60岁以上)的表现都比年轻(18-40岁)和中年成年人(41-60岁)在行动和非行动导向的BR任务中差。适度分析表明,SAQ得分显着调节了年龄和面向动作的BR之间的关系。结论:当前的结果与针对动作和非行动为导向的BR的倒U形发育曲线一致。作为一个创新的方面,在智力上,在童年和成年后期更高的感官互感水平上,在智力上代表自己身体部位的能力可能会受到负面影响。
眼科VEGF抑制剂
Date Action February 2017 Addition to PA June 2017 Removal of Lucentis and the addition of Macugen Addition of the requirement: not be used in combination therapy with other vascular endothelial growth factor (VEGF) inhibitors September 2017 Annual review September 2018 Annual review and reference update May 2019 Change to Eylea indication: patients with diabetic retinopathy (DR) no longer required to have concurrent DME June 2019 Annual review October 2019年BEOVU 2019年12月2019年12月审核2020年年度审查和参考更新2021年3月,从“不丢失大于15个字母的视力敏锐度”到“患者表现出对治疗的积极临床反应(例如,改善或维持最佳视力[BCVA]或视力降低的视力降低或视力降低的视力降低或降低视觉范围的降低)的临床反应(例如,更高的视力或维护)。还删除了2021年6月的年度审查和参考更新的启动的字母计数要求。由于2022年3月的年度审查和参考更新而停产,因此将Macugen从政策和附录1中删除。将Vabysmo添加到政策中,并在2022年6月1日将Susvimo和Vabysmo添加到附录中年度审查和参考更新。按PI更新,添加糖尿病性黄斑水肿的指示,2022年9月年度评论2022年12月2023年3月每年PI更新,增加了预示着早产视网膜病变(ROP)