机构名称:
¥ 1.0
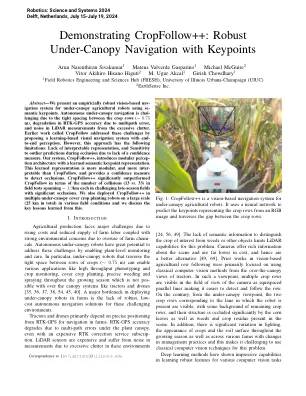
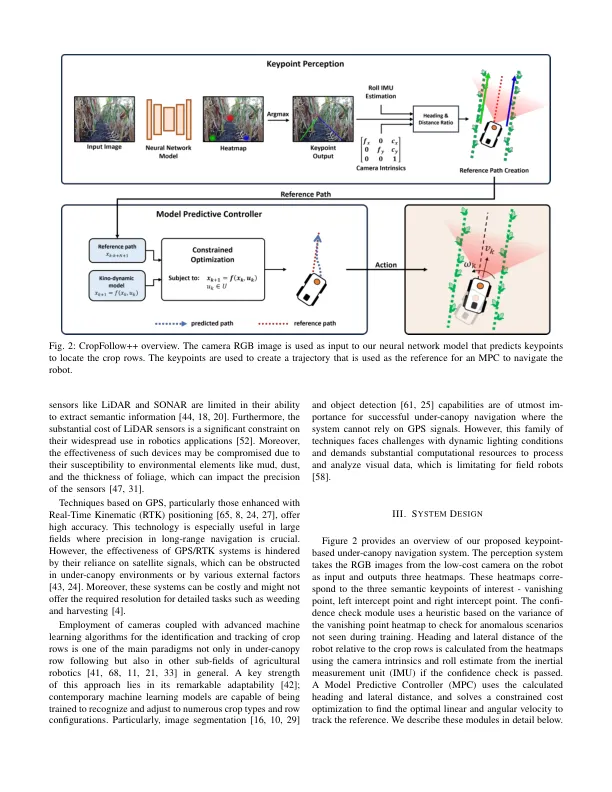
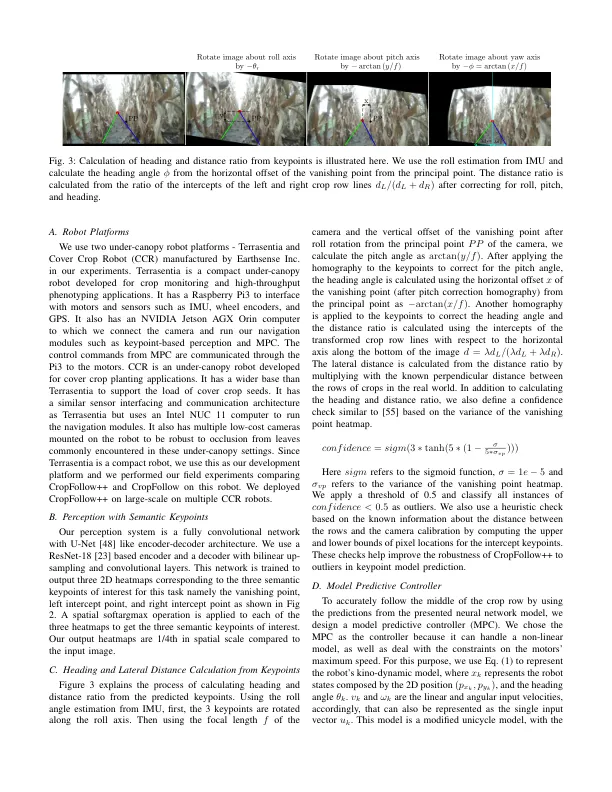
摘要 - 我们提出了一种基于稳固的视觉范围,用于使用Sepantic Kepoints的囊室不足农业机器人。自主态下导航由于作物行之间的紧密间距(〜0。75 m),由于多径误差而导致的RTK-GPS精度降解,以及从过度混乱中的LiDAR测量中的噪声。早期的工作称为crogfollow,通过提出具有最终感知的基于学习的视觉导航系统来解决这些挑战。然而,这种方法具有以下局限性:由于缺乏置信度措施而导致的遮挡过程中缺乏可解释的表示以及对异常预测的敏感性。我们的系统Cropfollow ++,以学习的语义关键点表示,引入了模块化感知体系结构。这种学习的表示形式比Cropfollow更模块化,更可靠,并且提供了一种置信度措施来检测闭塞。cropfollow ++在涉及碰撞的数量(13 vs. 33)的现场测试中,跨越〜1的碰撞数量显着超过了cropfollow。在挑战性的后期田野中,各有9公里。我们还在各种野外条件下大规模覆盖了多个囊性播种机器人的cropfollow ++,并讨论了从中学到的关键经验教训。
使用关键点的稳定不足导航
主要关键词


相关文件推荐