XiaoMi-AI文件搜索系统
World File Search System计算费用
通过控制和设计共选
软机器人利用合规的材料以灵活的方式与复杂和不确定的环境相互作用,从而可以操纵脆弱的物体并与生物的安全相互作用。它们的适应性推动了医学和制造等领域的创新。设计软机器人即使对于经验丰富的设计师,由于其非线性材料,多物理耦合,多个身体与环境之间的复杂相互作用及其许多自由度,即使对于经验丰富的设计师来说也很具有挑战性。这解释了为什么软机器人技术中的第一批设计受到自然的启发,模仿了诸如蠕虫或章鱼之类的软动物。软体能够符合硬对象并重新配置DI FF任务,然后将控制的重要部分委派给身体。与刚性机器人不同,体现的智能仍然是软机器人技术中的新兴话题。但是,很明显,可以很好地适应其环境的代理商可以快速学习智能行为。本文摆脱了传统的训练控制和敏捷性的关注,旨在通过将人工智能与软机器人设计联系起来来应对控制挑战。软机器人技术领域在建模,控制和设计方面提出了许多挑战。Inria Lille的除霜团队已经开发了几种有限元方法(FEM)的工具来应对这些挑战,从而可以准确地模拟软机器人。这些工具已用于低级控制,并在制造前评估了软机器人设计。此探索需要解决一些挑战。在这项工作中,应用了各种基于FEM的仿真和数值优化工具来探索软机器人的计算设计。设计空间必须非常大,才能探索相关的设计,但也受到了足够的限制,以使优化问题可以解决。开发相关的数学适应性功能对于准确评估软机器人设计的性能和效果至关重要。鉴于计算设计算法的重要数据要求和准确模拟的计算费用,我们旨在通过选择平衡计算时间和准确性的模型或使用学习技术来加速FEM模拟来加快模拟的速度。本论文探讨了软机器人的计算设计,重点是对数值结果的模拟到真实性。解决了两个参数软操作器的设计优化,一个具有嵌入式传感器,另一个具有自动接触功能。随着控制任务,环境和设计空间变得更加复杂,计算负担增加。这激发了从FEM模拟中学到的替代模型的发展,以表征软机器人的设计和控制。通过各种情况证明了该模型的适用性,特别是对气动操纵器的嵌入式控制和软操作器的计算设计。此外,这项工作的一个关键目标是开发工具以选择软机器人设计和控制。

从秩序到混乱:用机器学习驱动的模拟评估无定形石墨烯中的热性能
对无定形石墨烯中热性质的研究提出了材料科学和工程的独特挑战和机会。传统上,对无定形碳材料的热性能的研究依赖于为原始石墨烯设计的经验潜能,将这些模型扩展到其预期的适用性领域之外[1]。这项研究旨在通过利用高效且高保真机器学习跨原子潜力(MLIP)来克服这些局限性。实现材料势能表面(PE)的准确但计算有效的表示非常重要。尽管密度功能理论(DFT)之类的方法通过明确考虑系统中的电子而提供了详细且可转移的见解,但它们的适用性受到较差的可扩展性随着系统大小的增加而阻碍,将其实际用途限制在相对较小的系统中,并限制了模拟的持续时间。对经典途径中现有方法论的批判性检查表明,尽管当前的碳材料MLIP具有高度的准确性,但它们在无定形石墨烯研究中的实用性受到大量计算需求的阻碍[2]。在处理计算费用可能变得过于刺激的大型,无序的系统时,这种限制特别明显。解决这一差距时,我们的工作试图使用具有出色可扩展性的非晶石墨烯的MLIP,例如基于Allegro框架的电势,Allegro框架是一种严格的局部局部含量的深层神经网络间原子势[3],可以使用GPU进行加速。在分子动力学领域(MD)中,GPU并行化的出现已经改变了游戏规则,可显着增强计算能力。可伸缩性对于我们的研究至关重要,该研究涉及非晶石墨烯结构的复杂热性能,该结构以由于无序引起的计算强度而闻名。通过通过蒙特卡洛算法掺入石 - 孔缺陷的无形石墨烯结构的产生将使对碳基材料中的疾病进行受控的探索。原子间电位将应用于大规模的无定形结构,其结果对从经验潜能衍生出的结果进行了标准。通过采用这种方法,我们的研究不仅熟练地导航了与非晶石墨烯的复杂性质相关的计算障碍,而且为无序碳材料中的热特性进行准确,有效地研究了一个新的先例。我们的发现旨在有助于更深入地了解无定形石墨烯中的传热机制,为开发具有量身定制的热特性的高级材料铺平了道路,可用于广泛的应用,从电子设备到储能。
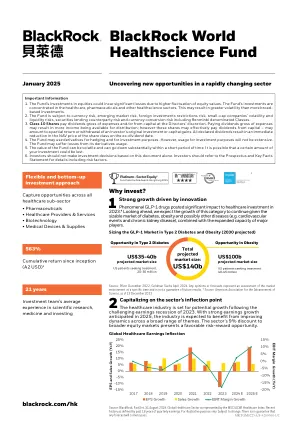
贝莱德世界健康科学基金
1来源:贝莱德,截至2024年12月底。过去的表现不是未来表现的指导。投资者可能无法收回投资的全部资金。绩效是根据股息再投资的时期NAV-NAV计算的。绩效数字是计算费用净额的。2基金选择者亚洲2024香港基金奖,2024年1月。FSA的基金奖项基于FE FundInfo的数据,该数据应用了三年来alpha的过滤器,波动性和绩效的一致性,以缩小香港基金宇宙的范围。在香港,必须注册资金进行零售销售,才有资格。然后将入围名单授予来自香港亚洲基金Selector社区的独立法官,该法官确定了14个类别中每个类别中的铂金和金奖者。3来源:晨星,截至2024年10月底。4 CityWire Asia Asset Management Awards 2024年10月1日至2024年9月30日。5在2023年6月27日之前,该基金由Erin Xie,Xiang Liu和Jeffrey Lee管理。在2020年6月1日之前,该基金由Erin Xie管理。6 A10股份年度收益率=(股息利率/EX-DATE NAV) *(12 * 100)。成立日期:A10 USD股票类别:2022年10月26日。不保证股息收益率,也不表示基金的退货。过去的表现不是未来表现的指导。投资者可能无法收回投资的全部资金。除非另有说明,否则所有信息仅适用于A2 USD共享类,截至2024年12月底。资料来源:黑石和晨星。绩效从月底显示为股票类货币以NAV至NAV价格为基础,收入已重新投资,费用净。上述资金数据仅用于信息,并且不构成任何人投资任何贝莱德全球资金(BGF)的报价或邀请,并且尚未与任何此类报价有关。BGF是一家在卢森堡成立的开放式投资公司,仅在某些司法管辖区出售。BGF在美国或美国人不可出售。与BGF有关的产品信息不应在美国投资中发表涉及风险。过去的表现不一定是未来绩效或回报的指南。投资及其收入的价值可能会波动,不能保证。交换率可能导致投资价值上升或下降。投资者可能不会收回他们投资的金额。个人股票/数字不代表基金的回报。投资回报以股票交易货币计价,这可能是外币。如果是这样,我们/基于美元的投资者将暴露于美国/香港/香港/外币汇率的波动。对于香港投资者,请参阅BGF提供文件的详细信息,包括风险因素。由BlackRock Asset Management Northa Limited发布。香港证券和期货委员会尚未对此材料和贝莱德网站(www.blackrock.com/hk)进行审查。©2025 BlackRock,Inc。或其分支机构。保留所有权利。BlackRock是BlackRock,Inc。或其分支机构的注册商标。所有其他商标都是其各自所有者的商标。

人工酶中远端突变的计算引导的工程
需要特定的c c类型的转换类型,这些转换不是天然发生的。5为了利用这些过程中的巨大酶良好的益处,已经设计了人工酶来产生新的催化反应性。6 - 8个促酶,从而产生基本的酶,然后可能会受到定向进化的能力,以实现通常与酶催化相关的高活性和选择性。9,10然而,尽管有明显的进展,但大多数人促酶的催化效率尚未与天然酶相媲美。11迄今为止,使用人工酶的大多数定向进化运动仅针对催化中心近距离的残留物,以直接影响其化学环境。越来越清楚的是,就像天然酶一样,整个蛋白质的12个结构合作也需要与人工酶促进酶进行催化。例如,刘易斯和同事观察到在模型环丙烷化反应中,在引入脱离活性位点的突变后,由人工hodios的模型环化反应提高了对映选择性。13 o s,远端突变的引入产生由蛋白质的先天结构动力学决定的细微结构重排,该结构动力学已在天然酶的进化中被逐渐构成。18,19是Hilvert等人设计的KEMP消除酶HG3.17的局部示例。14,15那些可以间接地通过调节结构动力学的催化活性的残基称为动力学的远端位点或热点。16,17针对定向演化算法中这些热点的16,17可以将构象动力归为催化生产构象,从而导致高度效率高的设计师酶。能够通过开发具有催化能力的构象合奏的速率加速度提高10 8倍。20当前,它们的鉴定阳离子o cen依赖于广泛的分子动力学(MD)模拟,这对工作的吞吐量构成了显着的限制。21尽管最近已经描述了基于机器的新策略并保持了大大减轻计算费用的希望,但对大型培训数据集的需求阻碍了他们在鲜为人知的系统中的应用。为了确定远端突变和远距离网络在人工酶中的作用,我们以23,24的lactocococococcal多药耐药性调节剂(LMRR)为示例,是探讨了以较广泛的新型到Nature Adectivitivitivities量身定制的混杂蛋白SCA效率的示例。该蛋白质属于padr遗传因素的PADR家族,并调节乳酸乳酸菌中LMR操纵子的表达。lMRR的特征是独特的构象thimational质量和结构可塑性25,26,在其大型恐惧孔中引起了宽阔的配体滥交。然后将这些基本酶定向进化,从而导致专业酶显着增加活性和(对映)的选择性。引入各种人工催化部分,金属复合物,27个非典型氨基酸(NCAA),28甚至两者均为29个具有多种新型催化性活性的endow LMRR。但是,迄今为止,迄今为止,定向进化仅集中在孔内的残基上,以优化新创建的活性位点的结构。在这里,我们展示了如何通过利用LMRR的构象动力学来进一步增加这些设计师酶之一的活性。