XiaoMi-AI文件搜索系统
World File Search System设计

刊首语8 园景新岁,共绘未来
广告索引 Advertisement Index P141 天津大学建筑设计规划研究总院有限公司 封底 北京《风景园林》杂志社有限公司 P142 上海水石景观环境设计有限公司 封二、P1 深圳市北林苑景观及建筑规划设计院有限公司 P143 深圳奥雅设计股份有限公司 封三 北京北林地景园林规划设计院有限责任公司 P144 深圳市蕾奥规划设计咨询股份有限公司


战术显控系统人机交互中的特征整合设计研究 - 包装工程
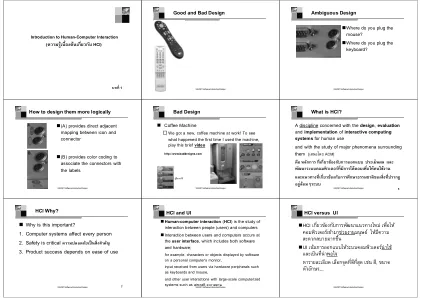
编码特征作为预测结果,邀请用户进行认知情况调 研。从用户调研数据的计算结果可知,用户对不同特 征编码的认知存在一定的共性,有共同的认知习惯。 1 )就属性语义来看,认知效率主要受色相、明 度、饱和度、尺寸、位置、形状的影响。色相:国军 标对色彩的应用有明确的规范,在进行色相编码时, 应考虑用户对专用色彩属性的认知习惯,严格遵守色 彩使用规范。对于没有硬性规定的色彩,也应以用户 过往的知识、经验为基础进行编码设计。如,在界面 设计中,一般认为红色表示危险,黄色表示警告,绿 色表示安全。明度:实验表明,在深色背景下,明度 越高信息等级越高。战术显控系统复杂性较高,合适 的明度编码设计适合应用于信息层级设计,能够有效 降低用户的学习成本。饱和度:饱和度取决于该色中 含色成分和消色成分(灰色)的比例。含色成分越大, 饱和度越大;消色成分越大,饱和度越小 [14] 。高饱和 度的色彩编码方式更能引起视觉关注,帮助用户集中 注意力。形状:在战术显控系统中,涉及形状属性的 元素主要为图形和符号,包括通用类和特殊类。在进 行形状编码时,现有图符应遵循沿用的原则,新的图 符应结合现实形态、行业背景进行设计,以符合用户 认知习惯、缩短学习过程,提高交互效率。尺寸:根 据实验结果显示,信息尺寸的大小与信息的重要等级 成正比,信息越重要,尺寸越大。位置:用户对显示 屏上的信息关注度依次为中间、左上方、右上方、左 下方、右下方 [15] 。在进行界面布局时,应注意信息等 级与其在界面中位置的一致性,同时要保证同类信息 的位置编码统一。 2 )就情感语义来看,战时用户的生理和心理负 荷较高,任务情景的不确定性易增加用户的操作压 力 [5] 。在进行交互界面设计时应考虑信息编码元素的 情感性。从实验结果来看,影响情感语义的特征主要 为形状和色彩。尖锐的形态容易让用户产生较大的心 理压力,而圆润浑厚的形状更容易使用户平静。在进 行形状编码时,可采用倒角的设计手法。根据蒙赛尔 色彩体系对色彩要素的划分及实验结果,战术显控系 统的主色可以选用冷色调,明度、饱和度不宜过高, 以避免色彩刺激增加用户的焦虑感。而对于重点信息 和即时变化类信息,可采用高明度或高饱和度的色 彩,以提高用户的警觉性。

通过设计与幼儿的设计促进批判性
随着儿童与新兴技术的日常互动的提高,他们需要发展批判性,以探索技术的道德意见以及在用技术中想象期货时。我们探讨了设计未来的设计如何通过来自印度,芬兰和美国的儿童的四个不同的讲习班来促进儿童的批判性。参与者想象着具有技术的期货,同时批判性地考虑道德影响。在调查结果中,与儿童想象的未来相关的主题与授权和道德有关。我们讨论了与孩子们想象中的未来促进批判性和赋权,以及这些未来如何根据他们的生活经验来应对多样化的当地问题。我们的工作通过强调当地的未来以及那些想象中的未来的批判性来使设计研究从世界各地的儿童中。
设计可交换电池组的设计-Diva
抽象背景由于过去十年的技术进步,电动汽车市场已迅速扩展,关键的推动力是开发具有更高能量密度,更快充电速度和寿命更长的高性能电池。建筑设备行业在电气化方面面临着独特的挑战,包括高功率需求,延长的运营时间以及最少的停机时间。为了应对这些挑战,沃尔沃建筑设备正在调查电池交换系统解决方案,该解决方案允许快速换台,减少停机时间和与机器的脱钩寿命。这项研究的目的是设计用于电池交换系统的电池组,同时回答以下研究问题:RQ1:在设计用于建筑设备的电池组时,电池模块,机架和辅助系统的哪种配置可实现最高的能量密度?rq2:设计电池模块,机架和辅助系统以实现用于施工设备的电池组的最高能量密度时,应考虑哪些因素?方法这个项目遵循Ulrich等人的有限版本。的(2019)产品开发过程,重点介绍了电池交换系统的概念开发和系统级设计。采用了一种归纳研究方法,从访谈,文献,文件和会议中收集了定性和定量数据,以对项目挑战产生整体理解。使用诸如前向和向后滚雪球之类的技术,使用多个数据库中的相关关键字进行了结构化文献审查。数据分析方法(包括对话分析)被用来构建和分析收集的数据,确保通过三角测量确保有效性和可靠性,并与沃尔沃的专家进行交叉引用。实证研究是通过基准测试和案例研究进行的,从内部文档和与产品开发人员进行沟通的规格和定性见解提供了定量数据。这些发现构成了迭代概念生成过程,强调了在早期阶段探索各种可能性的重要性。结论设计过程涉及评估先前的电池组解决方案,这些解决方案在预定义的约束中工作,例如使用特定的外壳,内部开发的电池模块,辅助组件,同时满足一组利益相关者的需求。由于电池组有新的内部布局,因此也开发了一些支持电池模块的辅助组件和一个支撑电池模块的机架。这导致了一个概念电池组,从理论上讲,其能量密度比以前的电池组解决方案高30%。提出的解决方案使沃尔沃建筑设备能够通过在给定约束内最大化存储容量来提供更长的运行时的机器和提高生产率。关键字:电池交换,电池组,产品开发,概念生成,建筑设备,设计,电池模块布局。