XiaoMi-AI文件搜索系统
World File Search System识别系统

利用深度复发神经网络的新型基于FPGA的意图识别系统
摘要:近年来,已经引入了基于非声音和非人工界面的监视和控制家庭环境的系统,以改善流动性困难的人的生活质量。在这项工作中,我们介绍了利用经常性神经网络(RNN)的这种新型系统的可重新实现和优化。在实现现实世界结果中所证明的是,在实施RNN时,FPGA被证明非常有效。尤其是,我们可重新发现的实现比执行参考推理任务的高端Intel Xeon CPU快150×。此外,与服务器CPU相比,所提出的系统在能量效率方面达到了300倍以上的改进,而在所报告的已达到的GFLOPS/W方面,它甚至超过了服务器量的GPU。本研究中讨论的工作的另一个重要贡献是,所证明的实施和优化过程也可以作为对实施RNN的推理任务的任何人的参考;我们的C ++代码是针对高级合成(HLS)工具量身定制的,这进一步促进了这一事实。

基于面部图像数据库的内分泌和代谢综合征诊断的人工智能面部识别系统
是国家卫生委员会内分泌委员会,北京北京医学科学院和北京北京的北京大学北京大学医学院医院部内分泌委员会,100730,B。致癌与翻译研究的主要实验室(北京教育部/北京部)(北京部),国家癌症医院,北京癌症医院,疾病学院。多模式人工智能系统,北京工程智能系统和技术研究中心,中国科学院自动化研究所,北京,北京,100190,中国D北国科学院d人工智能学院,北京大学,北京大学,100049,100049北京,100730,中国是国家卫生委员会内分泌委员会,北京北京医学科学院和北京北京的北京大学北京大学医学院医院部内分泌委员会,100730,B。致癌与翻译研究的主要实验室(北京教育部/北京部)(北京部),国家癌症医院,北京癌症医院,疾病学院。多模式人工智能系统,北京工程智能系统和技术研究中心,中国科学院自动化研究所,北京,北京,100190,中国D北国科学院d人工智能学院,北京大学,北京大学,100049,100049北京,100730,中国
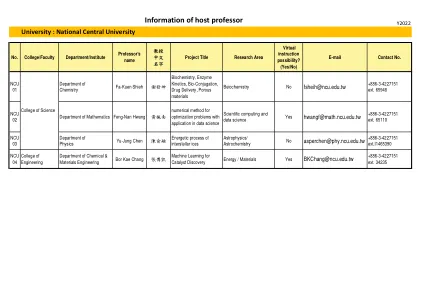
附件二、host professor information form_NCU.xlsx
人工智能(AI),深度学习,智能无人机,智能运输系统(ITS),强化学习(RL),神经建筑搜索(NAS),车辆品牌和模型识别,基于KINECT - 基于Kinect的在线手写识别系统,人员计数,行为分析,车牌检测和识别系统
欧盟人工智能法案:首部人工智能法规 | 新闻
出于执法目的,可能会允许某些例外情况。“实时”远程生物特征识别系统可用于有限数量的严重案件,而“后置”远程生物特征识别系统(即在较长时间延迟后进行识别)可用于起诉严重犯罪,但必须经法院批准。

使用实时自动识别系统 (AIS) 数据进行扩展卡尔曼滤波器设计和船舶运动预测
摘要 — 本文使用来自自动识别系统 (AIS) 的实时数据和扩展卡尔曼滤波器 (EKF) 设计来解决船舶运动估计问题。AIS 数据由全球船舶传输,甚高频 (VHF) AIS 接收器以美国国家海洋电子协会 (NMEA) 指定的格式接收编码的 ASCII 字符信号。因此,必须使用解析器解码 AIS 语句以获取实时船舶位置、航向和速度测量值。状态估计用于碰撞检测和实时可视化,这是现代决策支持系统的重要功能。使用来自挪威特隆赫姆港的实时 AIS 数据验证了 EKF,并证明了估计器可以实时跟踪船舶。还证明了 EKF 可以预测船舶的未来运动,并在防撞场景中分析了不同的规避动作。索引词——卡尔曼滤波器、状态估计、运动预测、碰撞检测、无人水面舰艇、船舶

Guihua Wang实时的表面识别系统,用于可变的双头机器人步行速度lcnet.pdf-科学技术学院
摘要 - 优化人工神经网络的计算效率对于资源受限的平台(例如自主驾驶系统)至关重要。为了应对这一挑战,我们提出了一个轻巧的上下文感知网络(LCNET),该网络加速了语义细分,同时在本文中保持了推理速度和细分精度之间的有利权衡。提出的LCNET引入了部分通道转换(PCT)策略,以最大程度地减少基本单元的计算潜伏期和硬件要求。在PCT块中,三个分支的上下文聚合(TCA)模块扩展了功能接收场,从而捕获多尺度上下文信息。此外,双重注意引导的解码器(DD)恢复了空间细节并增强了像素预测的认可。在三个基准上进行的广泛实验证明了拟议的LCNET模型的有效性和效率。值得注意的是,一个较小的LCNET 3_7仅获得了73.8%MIOU,只有51万个参数,分别使用单个RTX 3090 GPU和Jetson Xavier NX,其令人印象深刻的推理速度约为142.5 fps和〜9 fps。更准确的LCNET 3_11版本可以在约117 fps的推理速度下以相同的分辨率达到75.8%MIOU,在城市景观上约为117 fps推理速度。可以在较小的图像分辨率下实现更快的推理速度。LCNET在移动应用程序方案 - iOS的计算效率和预测能力之间取得了巨大的平衡。代码可在https://github.com/lztjy/lcnet上找到。

对3D对象表示和识别的评论
基于模型的对象识别系统从世界的图像中找到了现实世界中的对象,使用对象模型[Jain et ai。,1995]。对象识别过程是计算机视觉中最困难的问题之一。人类毫不费力,瞬间地执行对象识别,但是对机器实施的此任务的算法描述非常困难。自从我们的人生涉及3D空间以来,重要的是要有一个能够识别3D对象的系统。但是,与“ Flat” 20识别系统相比,开发3D对象识别系统要困难得多。Bliker&Hartmann [Bliker and Hartmann,1996]强调了3个原因,指的是此问题。首先,3D场景的处理允许在太空中的物体方向进行其他自由度。第二个对象可以部分遮挡,第三个对象,从任何给定的角度都可以看到对象的一侧,有时不足

使用生成模型合成情感神经生理信号:一篇评论论文
将情商融入机器是推进人机交互的重要一步。这要求开发可靠的端到端情绪识别系统。然而,公共有效数据集的稀缺带来了挑战。在这篇文献综述中,我们强调使用生成模型来解决神经生理信号中的这一问题,特别是脑电图 (EEG) 和功能性近红外光谱 (fNIRS)。我们对该领域使用的不同生成模型进行了全面的分析,研究了它们的输入公式、部署策略和评估合成数据质量的方法。这篇综述是一个全面的概述,提供了对生成模型在情绪识别系统中的应用优势、挑战和有希望的未来方向的见解。通过这篇综述,我们旨在促进神经生理数据增强的进展,从而支持开发更高效、更可靠的情绪识别系统。
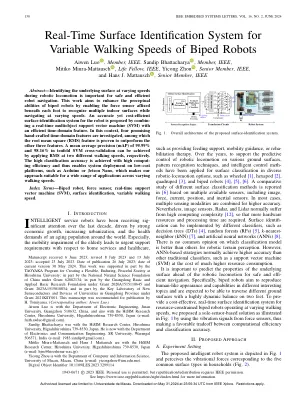
Guihua Wang 实时的表面识别系统,用于可变的双头机器人步行速度 lcnet.pdf-科学技术学院
摘要 - 在机器人运动过程中以不同速度识别基础表面对于安全有效的机器人导航很重要。这项工作旨在通过在每脚下方固定的力传感器来识别多个室内表面,同时以不同的速度导航,从而增强了双子机器人的感知能力。通过将实时多对象支持向量机(SVM)与有效的时域功能相结合,提出了一种机器人的准确但成本较固的表面标识系统。在这种情况下,研究了四个有希望的手工制作的时域特征,其中均方根(RMS)功能被证明超过了其他三个功能。可以通过分别以两个不同的步行速度应用RMS来实现十倍SVM交叉验证中95.99%和98.16%的平均平均精度(地图)。具有较高的计算效率可以实现高分类精度,因此可以在诸如Arduino或Jetson Nano之类的低成本平台上进行系统部署,这使我们的方法适合在各种步行速度之间进行广泛应用。