XiaoMi-AI文件搜索系统
World File Search System跟踪性能
风现象的建模及其对无人机轨迹跟踪性能的影响分析
本论文受版权和/或相关权利保护。它由西弗吉尼亚大学研究资料库在获得权利持有人许可的情况下提供给您。您可以自由地以适用于您的使用的版权和相关权利立法允许的任何方式使用本论文。对于其他用途,您必须直接获得权利持有人的许可,除非记录和/或作品本身中的 Creative Commons 许可证表明了其他权利。西弗吉尼亚大学研究资料库的授权管理员已接受本论文并将其纳入西弗吉尼亚大学研究生论文、学位论文和问题报告集合。有关更多信息,请联系 researchrepository@mail.wvu.edu。
基于曲率以提高自动驾驶汽车的高速驾驶稳定性...
本研究提出了一种基于进料前向(预览距离控制)和反馈(LQR,线性二次调节器)控制器的路径跟踪算法,以减少标题角误差和预定义路径和自主车辆之间的横向距离误差。路径跟踪的主要目标是生成控制命令以遵循预定义的路径。通过控制车辆的转向角而导致的轨迹误差和横向距离误差来求解馈线误差和横向距离误差。使用LQR来减少由环境和外部干扰引起的误差。通过使用CARLA模拟器模拟自动驾驶汽车的驾驶环境来验证所提出的算法。使用测试工具证明了安全性和舒适性。这项研究还表明,所提出的算法的跟踪性能超过了其他路径跟踪算法的跟踪性能,例如纯Pursuit和Stanley方法。

使用基于估计的非线性控制律对无人机进行 3-D 目标跟踪
摘要:本文介绍了一种基于估计的反步控制律设计,用于无人驾驶飞行器 (UAV) 跟踪 3-D 空间中的移动目标。地面传感器或机载导引头天线为追踪无人机提供距离、方位角和仰角测量,追踪无人机实施扩展卡尔曼滤波器 (EKF) 来估计目标的完整状态。然后,非线性控制器利用该估计的目标状态和追踪者的状态为追踪无人机提供速度、飞行路径和航向/航向角命令。针对三种情况评估与测量不确定性有关的追踪性能:(1) 平稳白噪声;(2) 平稳有色噪声和 (3) 非平稳(距离相关)白噪声。此外,为了提高跟踪性能,通过考虑测量中与范围相关的不确定性,使测量模型更加真实,即当追逐者接近目标时,EKF 中的测量不确定性会降低,从而为无人机提供更准确的控制命令。这些情况的仿真结果显示了目标状态估计和轨迹跟踪性能。

最大坐标中的线性季度最佳控制
摘要 - 线性季度调节器(LQR)是线性和线性化系统的效率控制方法。典型,LQR在最小坐标(也称为广义或“关节”坐标)中实现。然而,其他坐标是可能的,最近的研究表明,在使用高维非微小状态参数化对动态系统时,可能存在数值和控制理论的优势。这样的参数化是最大坐标,其中多体系统中的每个链接都通过其整个六个自由度进行参数化,并且链接之间的关节用代数约束对其进行建模。这样的约束也可以代表封闭的运动循环或与环境接触。本文研究了最小和最大坐标LQR控制定律之间的差异。将LQR应用于简单的摆和模拟的案例研究,比较了最小和最大坐标LQR控制器的吸引力和跟踪性能的盆地,这表明与在非线性系统中应用最小值的LQR相比,最大值的LQR可实现更大的鲁棒性,并提高了更高的稳健性,并提高了跟踪性能。
Sentinel A4 能力手册_1 - 洛克希德马丁
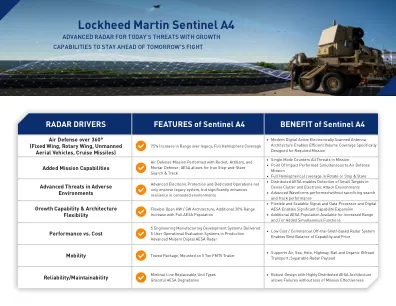
• 分布式 AESA 能够在密集杂波和电子攻击环境中探测小目标 • 执行高级波形时不会影响搜索和跟踪性能 • 灵活且可扩展的信号和数据处理器以及数字 AESA 可实现显着的功能扩展 • 额外的 AESA 数量可用于增加范围和/或添加同步功能
Sentinel A4 能力手册_1 - 洛克希德马丁
• 分布式 AESA 能够在密集杂波和电子攻击环境中探测小目标 • 执行高级波形时不会影响搜索和跟踪性能 • 灵活且可扩展的信号和数据处理器以及数字 AESA 可实现显着的功能扩展 • 额外的 AESA 数量可用于增加范围和/或添加同步功能

基于超扭转分数阶滑模控制的最优模型预测调节直流微电网直流侧电压
摘要:本文旨在从本质上调节电力系统扰动条件下直流微电网的直流母线电压。因此,提出了一种新型最优模型预测超扭转分数阶滑模控制 (OMP-STFOSMC),用于三相交流-直流转换器,可有效提高微电网的稳定性和动态性能。传统的模型预测控制器严重影响动态稳定性,导致过冲、下冲和稳定时间过长。可以用滑模控制器代替这些传统控制器,以适当解决此问题。传统滑模控制器的主要缺点是控制信号中的高频抖动,这会影响系统,并且使其在实际应用中不令人满意且不可行。所提出的 OMP-STFOSMC 可以有效提高控制跟踪性能并减少高频抖动问题。随机分形搜索 (SFS) 算法因其高探索性和良好的局部最优规避能力而被用于最佳地调整控制器参数。考虑不同的运行条件来评估所提出的控制器的动态和无抖动性能。通过比较分析的仿真结果,可以观察到所提出的OMP-STFOSMC具有更好的动态稳定性特性。关键词:直流微电网,跟踪性能,抖动问题,OMP-STFOSMC,SFS算法

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和负载减轻的非线性控制架构。通过利用控制冗余,可以在不降低刚体指令跟踪性能的情况下减轻阵风和机动负载。所提出的控制架构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低传统滑模控制方法的模型依赖性和最小可能增益。此外,姿态动力学为严格反馈形式;因此采用增量反步滑模控制。此外,还设计了一种新型负载参考生成器,用于区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点

评估各种视觉系统以检测协作机器人应用中的人姿势
摘要:跟踪在协作机器人附近工作的人类操作员可以改善安全体系结构,人体工程学的设计以及在人与机器人协作场景中执行汇编任务。使用了三个商业空间计算套件及其软件开发套件,可提供各种实时功能来跟踪人类姿势。本文探讨了结合不同硬件系统和软件框架功能的可能性,这些功能可能会导致在协作机器人应用中检测人姿势的更好的性能和准确性。本研究在六个深度水平上评估了他们的性能,并比较了原始数据和降噪的过滤数据。此外,将激光测量设备用作地面真相指标,以及平均均方根误差作为误差度量。根据位置准确性和可重复性进行了分析并比较所获得的结果,表明传感器的性能在跟踪距离上的依赖性。使用基于卡尔曼的过滤器融合了人类骨架数据,然后考虑其在不同距离区域的性能,重建操作员的姿势。结果表明,在小于3 m的距离下,Microsoft Azure Kinect显示出更好的跟踪性能,其次是Intel Realsense D455和Stereolabs Zed2,而在范围高于3 m的范围内,ZED2的跟踪性能出色。