机构名称:
¥ 1.0
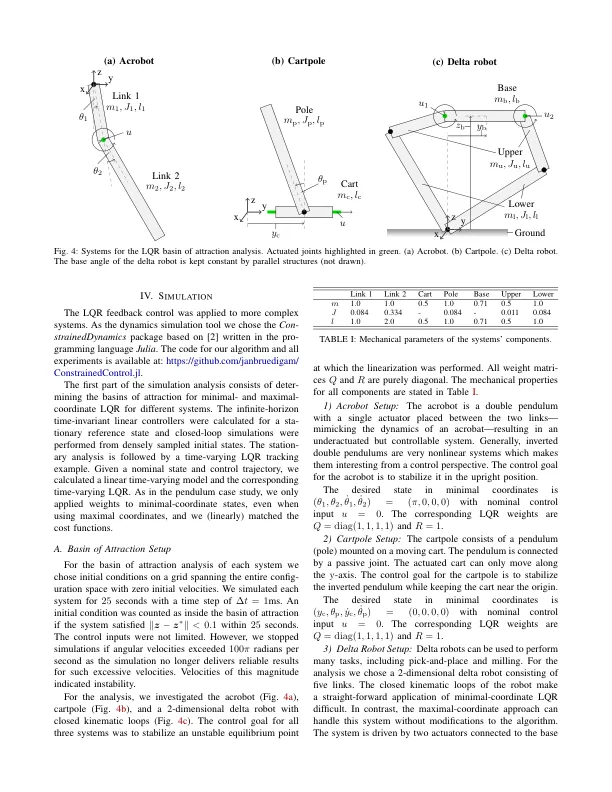
摘要 - 线性季度调节器(LQR)是线性和线性化系统的效率控制方法。典型,LQR在最小坐标(也称为广义或“关节”坐标)中实现。然而,其他坐标是可能的,最近的研究表明,在使用高维非微小状态参数化对动态系统时,可能存在数值和控制理论的优势。这样的参数化是最大坐标,其中多体系统中的每个链接都通过其整个六个自由度进行参数化,并且链接之间的关节用代数约束对其进行建模。这样的约束也可以代表封闭的运动循环或与环境接触。本文研究了最小和最大坐标LQR控制定律之间的差异。将LQR应用于简单的摆和模拟的案例研究,比较了最小和最大坐标LQR控制器的吸引力和跟踪性能的盆地,这表明与在非线性系统中应用最小值的LQR相比,最大值的LQR可实现更大的鲁棒性,并提高了更高的稳健性,并提高了跟踪性能。
最大坐标中的线性季度最佳控制
主要关键词




相关文件推荐