XiaoMi-AI文件搜索系统
World File Search System轨迹生成
一个基于自动驾驶汽车决策和轨迹计划的基于互动游戏理论-PSO的综合框架
摘要:自动驾驶汽车和人类驾驶员之间的相互依赖性是自动驾驶安全性和可行性的一个开放问题。本文介绍了游戏理论轨迹计划者和混合人流环境的决策者。我们的解决方案是与周围车辆的相互作用,同时做出决策,并使用用衣架插值方法产生类似人类的轨迹。此处使用的粒子群优化器(PSO)桥梁桥接决策和轨迹生成过程,用于连接执行。我们选择了一个未信号的交叉点,以证明我们方法的可行性。测试结果表明,我们的方法降低了轨迹优化问题的搜索空间的维度,并在路径曲率上实施了几何约束。

基于扩散的2D路径计划器应用于腿机器人
摘要 - 在这项工作中,我们提出了北斗七星,这是一个新颖而快速的2D路径计划框架,用于四足动物,利用扩散驱动的技术。我们的贡献包括用于MAP图像和相关轨迹的可扩展数据集生成器,用于移动机器人的图像调节扩散计划器以及采用CNN的训练/推理管道。我们在多个迷宫以及波士顿Dynamic的现场和Unitree的GO1机器人的现实部署方案中验证了我们的方法。北斗七星的轨迹生成平均比基于搜索和数据驱动的路径计划算法的速度快23倍,在产生可变长度的可行路径和障碍物结构中,平均一致性为87%。网站:https://rpl-cs-ucl.github.io/dipper/

基于学习的自适应控制四倍的机器人,用于运动平台上的主动稳定
摘要 - 由于独立的平台动作以及由此产生的多种惯性力量,机器人在机器人的六度移动平台(例如地铁,公共汽车,飞机和游艇)等六度移动平台上面临平衡挑战。为了减轻这些挑战,我们提出了基于学习的运动平台(LAS-MP)的主动稳定,具有自动平衡政策和系统状态估计器。策略会根据平台的运动自适应地调整机器人的姿势。估计器基于原则传感器数据推断机器人和平台状态。对于各种平台运动的系统培训方案,我们介绍了平台轨迹生成和调度方法。我们的评估表明,与三个基线相比,多个指标的卓越平衡性能。此外,我们对LAS-MP进行了详细分析,包括消融研究和评估估计器,以验证每个组件的有效性。

ControlTraj-Controlable-Trajectory-generation-with-Topoology- ...
生成轨迹数据是解决隐私问题,收集成本和通常与人类流动性分析相关的专有限制的有希望的解决方案之一。然而,由于人类活动的固有多样性和不可预测性,与忠实,灵活性和普遍性等问题有关,现有的轨迹生成方法仍处于起步阶段。为了克服这些障碍,我们提出了ControlTraj,这是一个具有拓扑约束扩散模型的控制范围的traj traj eTecorentor生成框架。与先前的方法不同,控制了一个扩散模型,以生成高保真轨迹,同时整合了道路网络拓扑的结构约束,以指导地理结果。具体来说,我们开发了一种新颖的路段自动编码器,以提取细粒度的道路嵌入。随后将编码的特征以及TRIP属性合并为名为GeiOnet的拟议地理DeNoing Unet架构,以从白噪声中综合地理传播。通过在三个现实世界数据设置进行实验,ControlTraj展示了其

Mark Moll的课程Vitae
本杰明·塔姆(Benjamin Tam),博士,澳大利亚昆士兰州大学自治机器人的自适应行为选择,2023年3月。Adam Pettinger博士,使用负担能力原始人来增强德克萨斯大学奥斯汀分校的机器人操纵任务自治和执行,2023年3月。Jeroen de Maeyer博士,受约束的最终效果路径下面:基于抽样的计划算法和基准测试框架,Ku Leuven,2021年11月。Andrew Short,博士,基于抽样的运动计划与联系人,沃隆隆大学,2020年6月。 Bryce Willey,MS,在2018年8月莱斯大学合并了机器人路径计划中的采样和优化。 Zachary Kingston,MS,一个基于限制抽样计划的统一框架,莱斯大学,2017年11月。 戴夫·科尔曼(Dave Coleman),博士,改善使用经验的运动计划的方法,科罗拉多大学博尔德大学,2016年12月。 Stephen Butler,MS,《时间 - 最佳轨迹生成问题》的一般算法,莱斯大学,2016年11月。。 Ryan Luna,博士,在复杂领域的机器人运动计划中结合了离散和连续的推理,莱斯大学,2016年5月。。 Devin Grady,博士,运动计划,与机器人任务中的不确定信息,莱斯大学,2013年12月。。Andrew Short,博士,基于抽样的运动计划与联系人,沃隆隆大学,2020年6月。Bryce Willey,MS,在2018年8月莱斯大学合并了机器人路径计划中的采样和优化。Zachary Kingston,MS,一个基于限制抽样计划的统一框架,莱斯大学,2017年11月。戴夫·科尔曼(Dave Coleman),博士,改善使用经验的运动计划的方法,科罗拉多大学博尔德大学,2016年12月。Stephen Butler,MS,《时间 - 最佳轨迹生成问题》的一般算法,莱斯大学,2016年11月。Ryan Luna,博士,在复杂领域的机器人运动计划中结合了离散和连续的推理,莱斯大学,2016年5月。Devin Grady,博士,运动计划,与机器人任务中的不确定信息,莱斯大学,2013年12月。

昆虫在人类世尼克·布Blüthgen1†,lynn v ...
摘要 - 复杂的3-D方案中的导航需要适当的环境表示,以了解现场的理解和轨迹生成。我们提出了一个高度效率和可扩展的全球导航框架,基于对环境的层析成像理解,以导航多层结构中的地面机器人。我们的AP-PRACH使用点云图生成断层图,以将几何结构编码为地面和天花板高程。然后,考虑到机器人的运动能力,它评估了场景遍历性。通过平行计算来加速绘制构造和场景评估。与直接在3D空间中的计划相比,我们的方法进一步减轻了轨迹产生的复杂性。它通过搜索多个断层切片并分别调整机器人高度以避免悬垂来生成3-D传播。我们在各种模拟方案中评估了我们的框架 - iOS,并在四足动物的机器人上进一步在现实世界中对其进行了测试。我们的方法将场景评估时间减少了三个数量级,并将路径计划速度提高了三倍,与现有方法相比,在各种复杂的3-D环境中表明了高度有效的全球导航。

Mohsen Azimi - 机械工程
• Mohsen Azimi、Alana Lund、Yuguang Fu、Herta Montoya、Luca Vaccino、Murali Krishnan、Seungho Rhee、Leila Chebbo、Adnan Shahriar、Zixin Wang、Amin Maghareh 和 Shirley J. Dyke,(2023)“HabSim:用于模拟外星栖息地系统的模块化耦合虚拟试验台”,美国航空航天学会。• Luca Vaccino、Mohsen Azimi、Shirley J. Dyke 和 Dawn Whitaker,(2023),“探索深空任务过渡期间对破坏性事件的应急响应”,美国航空航天学会。 • Luca Vaccino、Alana K. Lund、Shirley J. Dyke、Mohsen Azimi,“多物理深空栖息地的破坏建模、(2023)、检测、传播和修复”,工程软件进展。 • Saeid Nazari、Mohsen Azimi,“双足机器人关节轨迹生成,用于预定的 ZMP” • Mohsen Azimi、Qiuchen Zhang、Eniko T Enikov,“双旋翼机的系统识别、控制和稳定性;识别四旋翼机动态特性的简化模型。” 会议论文进展中 期刊论文已发表

基于 DMP 的受扰场景下机器人与人类之间的反应式交接
摘要 交接看似简单,但需要双方共同协调,这通常在动态协作场景中发生。实际上,人类能够适应并响应其伙伴的运动,以确保在受到干扰或中断的情况下无缝交互。然而,关于机器人交接的文献通常考虑的是简单的场景。我们提出了一种基于动态运动原语的在线轨迹生成方法,以实现机器人在受干扰场景中的反应性行为。因此,机器人能够适应人类的运动(如果交接中断,机器人会停止,同时在伙伴轨迹受到轻微干扰的情况下继续前进)。进行定性分析,以证明所提出的控制器在不同参数设置和非反应性实现下的能力。该分析表明,具有反应性参数设置的控制器产生的机器人轨迹在受到干扰的情况下可以被视为更加协调。此外,我们还对参与者进行了一项随机试验,以验证该方法,方法是通过问卷调查评估受试者的感知,同时测量任务完成情况和机器人空闲时间。事实证明,我们的方法可以显著提高交互的主观感知,并且在分析的两组参数之一下,任务性能指标没有出现统计上显着的下降。本文代表了在交接任务中引入明确考虑扰动和中断的反应控制器的第一步。

模块化异构集群自主在轨卫星组装
本文提出了一种分散式、分布式制导与控制方案,将异构卫星组件群组合成大型卫星结构。异构卫星群的组件卫星的选择以提高最终形状的灵活性,其灵感来自晶体结构和伊斯兰瓷砖艺术。在选择理想的基本构建模块后,进行基本的纳米卫星级卫星设计,以协助涉及姿态控制的模拟。群体轨道建造算法 (SOCA) 是一种制导和控制算法,用于实现在轨组装所需的有限类型异构性和对接能力。该算法由两部分组成:分布式拍卖使用障碍函数来确保为每个目标选择合适的代理;轨迹生成部分利用模型预测控制和顺序凸规划来实现到达所需目标点的最佳无碰撞轨迹,即使在非线性系统动力学的情况下也是如此。优化约束使用边界层来确定是否应应用防撞约束或对接约束。该算法在模拟扰动 6 自由度航天器动态环境中针对平面和非平面最终结构以及两个机器人平台(包括一群无摩擦航天器模拟机器人)进行了测试。
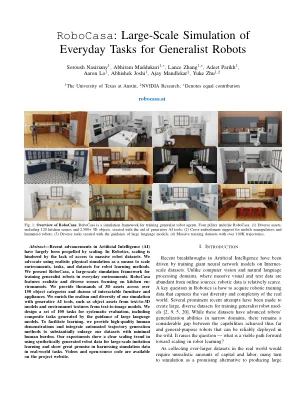
Robocasa:通才机器人日常任务的大规模模拟
摘要 - 人工智能(AI)的遗留进展很大程度上是通过缩放来推动的。在机器人技术中,由于缺乏对大型机器人数据集的访问而阻碍了缩放。我们提倡使用现实的物理模拟作为机器人学习方法扩展环境,任务和数据集的一种手段。我们提出了Robocasa,这是一个大规模的模拟框架,用于在日常环境中培训通用机器人。Robocasa以厨房环境为重点的现实和多样化的场景。我们提供了150多种对象类别以及数十个可相互作用的家具和设备的数千个3D资产。我们使用生成的AI工具来丰富模拟的现实性和多样性,例如文本到3D模型的对象资产以及来自文本图像模型的环境纹理。我们设计了一组100个用于系统评估的任务,包括大型语言模型指导产生的复合任务。为了促进学习,我们提供了高质量的人类示范,并整合自动轨迹生成方法,以实质上扩大我们的数据集的人类负担最小。我们的实验显示了使用合成生成的机器人数据进行大规模模仿学习的明确缩放趋势,并在利用现实世界任务中的仿真数据方面显示出巨大的希望。视频和开源代码可在项目网站上找到。