XiaoMi-AI文件搜索系统
World File Search System转盘

前列腺特异性膜抗原靶向探针,用于成像前列腺癌细胞中释放货物
摘要:磷氧化连接器的可调节性质可作为ph-触发的受控释放平台的广泛适用性,尤其是在抗体和小分子 - 毒物缀合物(ADC和SMDC)的背景下,在那里需要新的接头技术。在此,我们深入探讨了从均基磷脂酸酸可裂解的连接器中释放转交通的有效载荷。在代表全身循环,早期和晚期内体和溶酶体的pH条件下观察到有效载荷释放的有效载荷释放的动力学。发现有效载荷释放以两个关键的连续步骤进行:(1)P -N键水解和(2)间隔剂浸入。发现这两个步骤遵循伪 - 前阶动力学,并且对pH的依赖性相反。p -n键水解随pH值的降低而增加,而在生理pH值下,间隔剂的浸润最快。尽管这两个步骤的释放动力学对比了,但在轻度酸性pH值(5.0 - 5.5)下观察到最大有效载荷释放,而生理pH值最小的有效载荷释放。,我们将此磷酰胺类 - 付费接头系统整合到了PSMA靶向的荧光转探探针中,以研究在表达PSMA的前列腺癌细胞中溶出的细胞内传播和释放。结果表明,在这些细胞的内体和溶酶体隔室中,香豆素有效载荷的良好转盘和积累。该连接器的释放属性将其标记为ADC和SMDC模块化设计中的一种有吸引力的替代方案,该替代品需要由伴随细胞内traigking的pH变化触发的选择性细胞内有效载荷释放。

数字电影放映机
3 芯片 DMD 反射法 使用 2.0KW 高效氙气灯泡时为 9,000 流明 14m /46ft* 2200:1(全开/关)高效氙气(2.0KW 灯泡)(适用于 0.98 英寸 DLP 芯片) 1.2-1.8:1 变焦 1.3 至 1.75:1 变焦 1.9 至 3.25:1 变焦 1.4 至 2.05:1 变焦 2.4 至 3.9:1 变焦 1.59 至 2.53:1 变焦 3.9 至 6.52:1 变焦 电动 电动水平/垂直 电动 遮光板(光快门),镜头内存可存储镜头设置(移位/变焦/对焦)移位范围取决于镜头 0.98 英寸 DLP 12º 2048 x 1080 内部液体冷却,空气冷却带防尘静电过滤器 10600BTU 10 m³/min 是 1 x LAN 端口 [RJ-45]、1 x USB 端口 [A 型]、1 x 串行端口 (RS- 232C) [D-sub(9 针)、1 x 通用 I/O [D-sub(37 针)] 3D 通用 I/O(1 x D-sub [15 针])、1 x 远程控制连接器 4 x HD-SDI 端口 [BNC] 2 x DVI 端口 [DVI-数字] 投影仪:100 至 240V AC,50/60Hz,单相 灯泡:200 至 240V,50/60Hz 单相 头部 500W;灯泡电源 2600W,总计 3100W 5° 至 35° C 10% 至 85%(无凝结) -10° 至 50° C 700 x 990 x 503 mm 不包括镜头、遮光罩和排气管 92 kg(不包括镜头) 小于 62 dB EN55022 1998,A 类 EN61000-3-11 EN55024-1998 EN61000- 3-12 广角转换镜头和电动转盘、内置替代内容处理器、用于替代内容处理器的可选输入板、空气过滤器、1 年、零件保修 可提供其他配件。请访问 www.nec-display-solutions.com 了解详情。

通过定向无墨多材料打印柔性电子产品......
摘要 增材制造电子产品 (AME),也称为印刷电子产品,对于预期的物联网 (IoT) 越来越重要。这需要制造技术,允许将各种纯功能材料和设备集成到不同的柔性和刚性表面上。然而,目前的基于墨水的技术存在复杂且昂贵的墨水配方、与墨水相关的污染(添加剂/溶剂)以及有限的印刷材料来源等问题。因此,打印无污染和多材料结构和设备具有挑战性。这里展示了一种利用纳米和微米级定向激光沉积的多材料增材纳米制造 (M-ANM) 技术,允许打印横向和垂直混合结构和设备。这种 M-ANM 技术涉及对放置在打印机头内的目标转盘上的固体目标进行脉冲激光烧蚀,以原位生成无污染的纳米颗粒,然后通过载气将其引导至喷嘴并到达基板表面,在那里它们被第二束激光实时烧结和打印。目标转盘按照预定的顺序将特定目标与烧蚀激光束接触,从而在单个过程中打印多种材料,包括金属、半导体和绝缘体。利用这种 M-ANM 技术,可以打印和表征各种多材料设备,例如银/氧化锌 (Ag/ZnO) 光电探测器和混合银/氧化铝 (Ag/Al 2 O 3 ) 电路。我们的 M-ANM 技术的质量和多功能性为新兴物联网提供了潜在的制造选择。关键词:印刷电子、多材料打印、增材纳米制造、干打印、柔性混合电子。介绍随着物联网 (IoT) 的出现,大多数物体和系统都有望变得智能,人们对开发新材料和先进制造技术产生了浓厚的兴趣,以便将各种功能(包括传感器、电池、显示器和电子设备)直接集成到不同的表面上 [1-6]。传统的电子制造方法,如光刻、聚焦离子束 (FIB) 和电子束光刻 (EBL),需要复杂且昂贵的洁净室设施或高真空设备,并且还涉及多个减材步骤。因此,人们对可以在大气条件下工作并在各种表面上打印的经济高效的增材制造/打印技术产生了广泛的兴趣。

航空视觉感知
图 1.1 环境、飞行员和飞机的相互作用 3 图 1.2 事故下滑道 5 图 1.3 黑洞错觉 6 图 1.4 精密进近航道指示灯 6 图 1.5 哈德逊河迫降 14 图 2.1 陨石坑阴影错觉 24 图 2.2 视觉系统的主要组成部分和路径 26 图 2.3 人眼的横截面示意图 29 图 2.4 三种视锥细胞的光感受器吸收曲线 38 图 2.5 跑道的缩短示例 44 图 2.6 从高处看视角几何 47 图 2.7 转盘错觉 49 图 2.8 横向和内侧视角示意图 50 图 2.9 前庭系统组件 53 图 3.1 正弦波光栅 64 图 3.2 对比敏感度函数 65 图 3.3有用视野 71 图 3.4 平均左转安全裕度研究数据 75 图 3.5 视觉敏锐度与眩光敏感度之间的关系 76 图 4.1 3 度下滑道的高度和距离 91 图 4.2 目视俯视和目视直进进近描述 93 图 4.3 着陆进近的三张照片 94 图 4.4 降落在阿尔伯克基国际机场 96 图 4.5 亚速尔群岛葡萄牙丰沙尔的夜间延时照片 99 图 4.6 降落在巴西圣保罗马特雷机场 100 图 4.7 降落在澳大利亚汉密尔顿岛大堡礁机场的最后进近 102 图 4.8 降落在亚速尔群岛葡萄牙圣乔治岛的短距离进近 103 图 4.9 降落在爱沙尼亚塔林机场 103 图 4.10在南极麦克默多站着陆的简短最后阶段 105 图 4.11 空中加油照片 109 图 5.1 张开角度 120 图 5.2 着陆期间的高度提示 123 图 5.3 视网膜图像扩展以估计接触时间 128

克兰街外墙改善计划......
斯克内克塔迪 - SD 1900 年左右的惊人增长蒙特普莱森特沿克兰街的传统购物区始于 20 世纪初,服务于被良好的工厂工作机会吸引而涌入斯克内克塔迪的移民。来自东欧的波兰人、立陶宛人和犹太人;来自地中海的意大利人和来自不列颠群岛的爱尔兰人来到这里,填补了通用电气、西屋电气和美国铝业公司不断增长的劳动力大军。投机性住房随处可见,许多双家庭住宅可供多代人居住。克兰街这部分沿线的许多早期商业建筑仍保留了下来。它们是多层的混合用途建筑,拥有传统的店面,楼上的公寓有单独的入口。克兰街社区购物中心一直以来都是为移民服务的。现在也是如此。许多房产现在归圭亚那人所有。他们的数量也在增长。全市有 6,000 多名交通发展 莫霍克&哈德逊铁路是纽约州修建的第一条铁路,连接哈德逊河上的奥尔巴尼和莫霍克河上的斯克内克塔迪:一条 16 英里长的穿过松林荒地的轨道。修建这条线路是为了让伊利运河的乘客能够快速绕过迂回的科霍斯瀑布船闸系统。这使他们的旅程从一整天减少到一小时以内。德威特克林顿机车拉着改装的驿马车,是美国最早的蒸汽机车之一,行驶速度可达 30 英里每小时。最初,这条线路终止于两座城市之外,以避开陡坡。斯克内克塔迪终点站克兰街被称为发动机山。线路终点是机车的转盘。斯克内克塔迪的第一个火车站位于克兰街 803 号,是一座小型砖砌建筑,被称为莫霍克&哈德逊铁路的西站。 1905 年,Pleasant Valley 大桥竣工,用于将斯克内克塔迪铁路公司的有轨电车服务延伸至 Mont Pleasant。这条有轨电车铁路连接是鼓励新住房建设的关键因素——这是斯克内克塔迪最密集的社区。它将 5,000 多人与市中心和工厂连接起来。Crane Street-Scotia 有轨电车线路是斯克内克塔迪铁路公司客流量最大、利润最高的线路之一。但到了 20 世纪 30 年代,公交车已经取代了这一城市通勤系统。
遥测系统的测试方法和子系统第 1 卷...
图 6-3a。用于验证 IRIG 时间码准确性的基于 PC 的测试设置。...................................... 6-12 图 7-1。单个 CAIS 总线配置。......................................................................... 7-2 图 7-2。分离 CAIS 总线配置。......................................................................... 7-2 图 7-3。配置检查流程图 (1/2)。............................................................. 7-4 图 7-4。配置检查流程图 (2 / 2)。......................................................... 7-5 图 B-1。热瞬态测试设备。............................................................................. B-2 图 B-2。底座。................................................................................................................ B-3 图 B-3。传感器固定装置支架。................................................................................ B-4 图 B-4。传感器固定装置(黄铜)。................................................................................ B-5 图 B-5。玻璃固定环。............................................................................................. B-6 图 B-6。传感器安装插头。............................................................................................. B-7 图 B-7。闪光灯滑块。............................................................................................. B-8 图 B-8。灯架(大)。......................................................................................... B-9 图 B-9。灯架(小)。.................................................................................... B-10 图 B-10。使用开槽旋转盘和相当于测量应用的热源对传感器进行瞬态热冲击测试的测试设置。.................... B-15 图 C-1。发射器 RF 包络。................................................................................. C-1 图 C-2。晶体探测器输出。.................................................................................... C-1 图 C-3。幅度调制。......................................................................................... C-2 图 D-1。测量值和计算值。...................................................................... D-2 图 E-1。GUI 控制窗口。......................................................................................... E-6 图 E-2。文件浏览器窗口。...................................................................................... E-6 图 E-3。对话框:载波跟踪滤波器。.................................................................... E-7 图 E-4。对话框:符号跟踪滤波器。.................................................................. E-8 图 E-5。外部/接收器/眼图。外部、离散时间散点图。................................................................ E-10 图 E-6。................................................................. E-10 图 E-7。循环同步进度。......................................................................... E-10 图 E-8。表格分析摘要。............................................................................. E-11 图 E-9。图形分析控制窗口。......................................................................... E-11 图 E-10。假锁定眼图。.................................................................................... E-13 图 E-11。假锁定星座。................................................................................. E-13 图 E-12。数据采集设备。................................................................................ E-16 图 F-1。分析仪结构。.............................................................................................. F-3 图 F-2。参考功率谱。......................................................................................... F-4 图 F-3。星座图。............................................................................................. F-5 图 F-4。检测滤波器。......................................................................................... F-6 图 F-5。发射机测试设备。.......................... F-13 图 F-7。................................................................................ F-6 图 F-6。参考信号的比特间隔载波相位轨迹。发射机性能摘要。................................................................ F-15 图 F-8。使用差分编码预测的检测性能。.......................... F-15 图 F-9。基带频谱。................................................................................ F-16 图 F-10。在发射机 RF 端口测量的 OQPSK 星座。................................. F-16 图 F-11。决策样本直方图。................................................................................ F-17 图 F-12。在发射机 RF 端口测量的 OQPSK 星座。................................. F-17 图 F-13。箱间隔相位轨迹。......................................................................... F-18 图 F-14。轨迹偏差频谱。.............................................................................. F-19
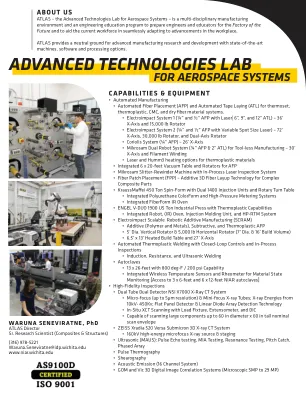
先进技术实验室
能力和设备 • 自动化制造 • 适用于热固性、热塑性、CMC 和干纤维材料系统的自动纤维铺放 (AFP) 和自动带铺设 (ATL)。 • 电冲击系统 1(带激光的 ¼” 和 ½” AFP | 6”、9” 和 12” ATL)– 36' X 轴和 15,000 磅旋转器 • 电冲击系统 2(带可变光斑尺寸激光器的 ¼” 和 ½” AFP)– 72' X 轴、30,000 磅旋转器和双轴旋转器 • 科里奥利系统(¼” AFP)– 26' X 轴 • Mikrosam 双机器人系统(¼” AFP 和 2” ATL)用于免工具制造 – 30' X 轴和纤维缠绕 • 适用于热塑性材料的激光和 Humm3 加热选项 • 用于 AFP 的集成 6 x 20 英尺真空工作台和旋转器 • 带有在线激光检测系统的 Mikrosam 分切复卷机 • 光纤贴片放置 (FPP) –复杂复合材料部件 • KraussMaffei 450 吨旋压成型机,配备双 1400 注射单元和旋转转盘 • 集成聚氨酯 ColorForm 和高压计量系统 • 集成 FiberForm IR 烤箱 • ENGEL V-DUO 1900 美国吨工业压力机,具备热塑性能力 • 集成机器人、(IR) 烤箱、注塑单元和 HP-RTM 系统 • Electroimpact 可扩展机器人增材制造 (SCRAM) • 增材(聚合物和金属)、减材和热塑性 AFP • 5' 直径。垂直旋转器和 5,000 磅水平旋转器(7 英尺直径和 16 英尺构建体积)• 6.5 英尺 x 13 英尺加热构建台和 27 英尺 X 轴 • 带有闭环控制和过程检查的自动热塑性焊接 • 感应、电阻和超声波焊接 • 高压釜 • 13 x 26 英尺,800 华氏度/200 psi 能力 • 集成无线温度传感器和流变仪用于材料状态监控 [可使用 3 x 6 英尺和 6 x 12 英尺 NIAR 高压釜] • 高保真检查 • 双管双探测器 NSI X7000 X 射线 CT 系统 • 微焦点(分辨率高达 5µm)和小焦点 X 射线管;X 射线能量从 10kV 到 450Kv;平板探测器和线性二极管阵列检测技术 • 带负载夹具、引伸计和 DIC 的现场 XCT 扫描 • 能够扫描直径达 60 英寸 x 高 60 英寸的标称扫描范围的大型部件 • ZEISS Xradia 520 Versa 亚微米 3D X 射线 CT 系统 • 160kV 高能微焦点 X 射线源和分期 • 超声波 (MAUS):脉冲回波测试、MIA 测试、共振测试、音高捕捉、相控阵 • 脉冲热成像 • 剪切干涉 • 声发射(16 通道系统) • GOM 和 Vic 3D 数字图像相关系统(微观 5MP 至 29 MP)