XiaoMi-AI文件搜索系统
World File Search System进近

波音 737-800 飞机进近时坠毁
简介 2009 年 2 月 25 日,土耳其航空公司运营的一架波音 737-800(航班 TK1951)从土耳其伊斯坦布尔阿塔图尔克机场飞往阿姆斯特丹史基浦机场。由于这是一次“监督下的航线飞行”,驾驶舱内有三名机组人员,分别是机长(兼任教练)、副驾驶(必须在航线上积累经验,因此在监督下飞行)和观察飞行的安全飞行员。机上还有四名机组人员和 128 名乘客。在接近史基浦机场 18 号右跑道(18R)时,飞机在距离跑道入口约 1.5 公里处坠毁在一片田地中。此次事故造成包括三名飞行员在内的四名机组人员和五名乘客丧生,另有三名机组人员和 117 名乘客受伤。
基于 GPS 的飞机进近和着陆系统的开发...
尖端技术构建美好未来:宇宙应用的先进技术 隼鸟2号的离子发动机及其潜在应用 隼鸟2号——自主导航、制导和控制系统 支持龙宫小行星精确着陆 隼鸟2号航天器利用太空激光雷达和遥感技术自主着陆 隼鸟2号:系统设计和运行结果 用于高速、大容量数据通信的光学卫星间通信技术 为三朝深空站开发30kW级X波段固态功率放大器 开发世界最高性能的薄膜太阳能电池阵列桨片
用于精密进近的差分 GPS - CORE
摘要:目前,美国国防部使用几种精确着陆系统 (PLS),包括仪表着陆系统 (lLS)、自动航母着陆系统 (ACLS)、 地面站设备,并且不是在不同服务中统一实施的。 这导致了各服务之间的可靠性问题。此外,这些着陆系统存在许多缺陷,包括可用性、人力需求和频繁拥堵。 因此。 需要一种新的 Pn:d 离子着陆系统来满足国防部的要求。地面站设备,并且不是在不同服务中统一实施的。这导致了各服务之间的可靠性问题。此外,这些着陆系统存在许多缺陷,包括可用性、人力需求和频繁拥堵。因此。需要一种新的 Pn:d 离子着陆系统来满足国防部的要求。
从空中交通管制员角度看进近和着陆程序的实际问题
醒来时发现卧室里有一架波音 747。如果您曾经飞抵华盛顿国家机场,并想知道为什么您的飞机在着陆前突然转弯,那是因为您的进近没有真正对准跑道。您的进近是在波托马克河的中部,因此您没有产生噪音危害。不幸的是,跑道并没有完全对准河的中部。当天气好的时候,这个程序不会带来什么问题。当天气不好的时候,它可能会很可怕。虽然这通常不被认为是管制员的问题,但您必须记住,任何规定飞机在进近过程中必须在特定时刻的位置的程序都会限制管制员的灵活性。当程序的目的与飞行安全无关时,这尤其令人沮丧。
进近时失去控制 Colgan Air, Inc. 经营名称为 ...
美国国家运输安全委员会。2010 年。进近时失去控制,科尔根航空公司,作为大陆联运运营的 3407 航班,庞巴迪 DHC-8-400,N200WQ,克拉伦斯中心,纽约,2009 年 2 月 12 日。NTSB/AAR-10/01。华盛顿特区。摘要:本报告讨论了科尔根航空公司一架庞巴迪 DHC-8-400、N200WQ 飞机(作为大陆航空 3407 航班运营)在仪表进近纽约州布法罗的布法罗尼亚加拉国际机场时失去控制,坠毁在纽约州克拉伦斯中心的一处住宅区,该住宅区位于机场东北约 5 海里处。本报告讨论的安全问题重点关注防止机组监控失灵的策略、飞行员专业性、疲劳、补救培训、飞行员培训记录、空速选择程序、失速训练、联邦航空管理局 (FAA) 监督、飞行运行质量保证计划、在驾驶舱使用个人便携式电子设备、FAA 使用安全警报让操作员传输安全关键信息以及向飞行员提供的天气信息。有关这些问题的安全建议已提交给 FAA。美国国家运输安全委员会 (NTSB) 是一家独立的联邦机构,致力于促进航空、铁路、公路、海运、管道和危险材料安全。该机构成立于 1967 年,由国会通过 1974 年《独立安全委员会法案》授权调查交通事故、确定事故的可能原因、发布安全建议、研究交通安全问题并评估涉及交通的政府机构的安全有效性。NTSB 通过事故报告、安全研究、特别调查报告、安全建议和统计审查公开其行动和决定。最新出版物可在互联网上完整查阅,网址为 。您还可以从网站或联系以下机构获取有关可用出版物的其他信息:国家运输安全委员会记录管理部,CIO-40 490 L’Enfant Plaza, SW Washington, DC 20594 (800) 877-6799 或 (202) 314-6551 国家运输安全委员会出版物可从国家技术信息服务处购买,可单独购买或订阅。第 1154(b) 条禁止在因报告中提及的事项造成的损害的民事诉讼中采纳或使用与事件或事故相关的国家运输安全委员会报告作为证据。要购买本出版物,请从以下机构订购报告编号 PB2010-910401:国家技术信息服务 5285 Port Royal Road Springfield, Virginia 22161 (800) 553-6847 或 (703) 605-6000《独立安全委员会法案》,编纂于 49 U.S.C.
基于近端策略优化算法及视觉感知的机械臂导纳控制研究
在现代操纵器交互任务中,由于环境的复杂性和不确定性,准确的对象表面建模通常很难实现。因此,改善操纵器与环境之间相互作用的适应性和稳定性已成为相互作用任务的重点之一。针对操纵器的互动任务,本文旨在在视觉指导下实现良好的力量控制。因此,基于Mujoco(带有触点的多关节动力学)物理引擎,我们为操纵器构建了交互式仿真环境,并创新地集成了基于位置的视觉伺服控制和录取控制。通过深度强化学习(DRL)中的近端策略优化(PPO)算法,有效地集成了视觉信息和力量信息,并提出了结合视觉感知的接收性控制策略。通过比较实验,将允许控制与视觉感知相结合,并将力控制的整体性能提高了68.75%。与经典的入学控制相比,峰值控制精度提高了15%。 实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。与经典的入学控制相比,峰值控制精度提高了15%。实验结果表明,在平坦和不规则的凹面环境中,允许控制与视觉感知结合表现良好:它不仅可以准确地执行视觉构成的力控制任务,而且还可以在各种接触表面上维持施工力,并迅速适应环境变化。在精确组装,医疗援助和服务操纵器的领域中,它可以提高操纵器在复杂和不确定的环境中的适应能力和稳定性,从而促进智能操纵器的自主操作的发展。
用于近眼显示设备光栅中Cr 的ICP 刻蚀工艺研究
周燕萍 ( 通信作者 ), 硕士 , 研究员 , 主要研究方向为半导体材料的刻蚀工艺开发 。E-mail:yanping_zhou@ ulvac. com
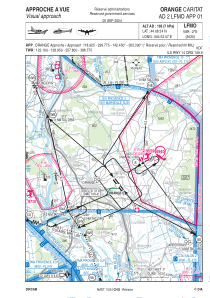
ORANGE CARITAT AD 2 LFMO APP 01 APPROCHE A VUE 视觉进近
在以下条件下,无需激活 CAM V 或 VFR(仅限 AD 交通)中的 ORANGE 空域,即可执行无 CTR DEP 或 ARR 的程序:HEL:VIS > 800 米(或 ACFT:VIS > 1500 米)或飞行 30 秒,在云层之外可看见地面 跑道 32 环路:- DEP 在轴线 2000' QFE(2200' QNH)处,然后全向追逐 - ARR:在 CTR 横向限制前下降到 1500' QFE:- 从西边,经 Pont Saint Esprit 直接顺风左手 32 - 从东边,经 Carpentras 垂直报告 TACAN ORG 避开 CTR AVIGNON 加入顺风左手 32 环路 RWY 14:- DEP 避开 CTR AVIGNON 或直接顺风左手 32 经过 500' 爬升至 2000' QFE (2200' QNH) - ARR: 在 CTR 横向界限前下降至 1500' QFE: - 从西部,经 Pont Saint Esprit 直达
基于 GPS 的飞机进近和着陆系统 (GBAS:地基增强系统) 的开发
尖端技术构筑美好未来:先进宇宙应用技术 隼鸟2号离子发动机及其潜在应用 隼鸟2号——自主导航、制导和控制系统 支持龙宫小行星精确着陆 利用星载激光雷达遥感技术实现隼鸟2号航天器的自主着陆 隼鸟2号:系统设计和运行结果 用于高速、大容量数据通信的卫星间光学通信技术 为三朝深空站开发30kW级X波段固态功率放大器 开发世界最高性能薄膜太阳能电池阵列桨片
