XiaoMi-AI文件搜索系统
World File Search System远程监视

K. Nagendra Prasad,Shaik Khamruddin,Sampangi Srinivas,V。Pavan,E。Surendar,Udayakiran,“金属传感器的设计和制造A
该机器人旨在穿越各种地形,检测金属对象,并提供实时视频流,用于远程监视和监视应用程序。全地形机器人配备了坚固的底盘和坚固的车轮,以确保跨不同表面的有效运动,包括粗糙的地形,砾石,沙子,沙子和不均匀的景观。纳入机器人的高扭矩电动机系统使其能够轻松克服障碍物和陡峭的倾斜度,从而确保在具有挑战性的环境中可靠的性能。为了驱动机器人的机能系统中使用的高扭矩电动机,使用了10A拉丝电机驱动器。该电机驱动器提供了必要的功率和控制信号,以有效地驱动电动机,从而确保机器人的精确运动和可操作性。10A刷子驱动器提供了强大的性能和保护功能,从而保护电动机免受过电流或电压异常的影响。为了促进金属检测,机器人配备了专用传感器系统,能够检测其附近的金属物体。此传感器系统利用电磁原理来识别和定位金属目标,提供有关此类物体的存在和大致位置的宝贵信息。金属检测能力通过实现诸如搜索和救援,考古探索和工业检查等应用来提高机器人的多功能性。此外,全地形机器人配备了实时流媒体功能,该功能允许实时视频传输到远程位置。此功能使用户能够远程监视机器人的周围环境和活动,从而在各种情况下提高情境意识并促进决策。通过集成无线通信技术,实现了实时流媒体功能,从而使视频数据通过网络连接无缝传输。
中国海军现代化:对美国海军能力的影响背景和国会面临的问题
中国军事现代化的几个要素对未来美国海军所需的能力有潜在影响。这些要素包括战区弹道导弹 (TBM)、对地攻击巡航导弹 (LACM)、反舰巡航导弹 (ASCM)、地对空导弹 (SAM)、陆基飞机、水雷、潜艇、水面战舰、两栖舰艇、核武器以及可能的高功率微波 (HPM) 设备。中国海军的限制或弱点包括在距离中国较远的海域作战的能力、联合作战、C4ISR(指挥、控制、通信、计算机、情报、监视和侦察)、远程监视和瞄准系统、防空战 (AAW)、反潜战 (ASW)、水雷对抗 (MCM) 以及造船业对外国供应商的依赖。
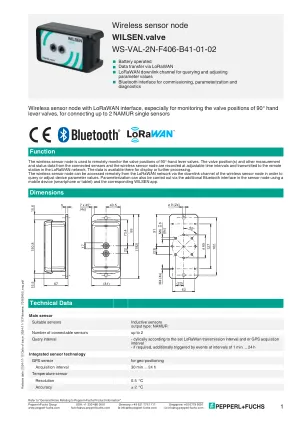
无线传感器节点Wilsen.Valve WS-VAL-2N-F406- ...
无线传感器节点用于远程监视90°手杆阀的阀位置。从连接的传感器和无线传感器节点的阀位置以及其他测量和状态数据以可调时间间隔记录,并将其传输到洛万网络中的远程站。该数据可用于显示或进一步处理。可以通过无线传感器节点的下行链路通道从Lorawan网络远程访问无线传感器节点,以查询或调整设备参数值。参数化也可以使用移动设备(智能手机或平板电脑)和相应的Wilsen应用程序通过传感器节点中的其他蓝牙接口进行。
中国海军现代化:对美国海军能力的影响背景和国会问题
中国军事现代化的几个要素对未来美国海军能力的必要性具有潜在影响。这些要素包括战区弹道导弹 (TBM)、对地攻击巡航导弹 (LACM)、反舰巡航导弹 (ASCM)、地对空导弹 (SAM)、陆基飞机、水雷、潜艇、水面战舰、两栖舰艇、核武器以及可能的高功率微波 (HPM) 设备。中国海军的限制或弱点包括在距离中国较远的海域作战的能力、联合作战、C4ISR(指挥、控制、通信、计算机、情报、监视和侦察)、远程监视和瞄准系统、防空战 (AAW)、反潜战 (ASW)、水雷对抗 (MCM) 以及造船业对外国供应商的依赖。

EBL512 G3系统
›针对EN54-2,EN54-4和EN54-13› 4 COM循环› 1.012地址›可寻址循环单元(512个警报点)›每个控制单元最多16个COM循环中转单元›集成显示和键盘,包括软键,包括软键›冗余网络和30个控制单元的组合,可连续配置›多连接套装›多元驱动器››连续套装››多元范围››多元范围›超键››多势驱动器›活动日志,最多3.000个条目,可扩展到10.000事件›图形故障射击系统›可用的自动和手动地址设置可用›准备远程监视和操作准备›与第三方BMS和安全管理系统
AFI 监视策略 - ICAO
• 安装在监视目标内的“远程监视子系统”,它有两个主要功能:从不同的机载传感器/接口收集数据,并将其传输到系统的其他部分或其他用户; • 传感器系统,用于接收和收集有关监视目标的监视信息; • 通信系统,用于将传感器系统连接到 SDP 系统并允许传输监视数据。地面通信也可以支持对传感器的控制和监视;以及 • 数据处理系统,用于将从不同传感器接收到的数据组合成一个数据流,可选地将监视数据与其他数据集成,并以指定的方式向用户提供/分发数据,消除不同类型传感器可能存在的不同特性。
网络安全:电力部门运营技术系统挑战的观点
电力传输实用程序系统包括控制系统,例如远程终端单元(RTU)以及监督控制和数据采集(SCADA)系统。传感器和执行器从现场收集数据,并根据控制系统命令启动操作。人机接口(HMI)允许操作员和工程师与OT系统进行交互,可视化数据和控制过程。网络基础架构连接OT设备和系统,启用数据交换,远程监视和控制。图1描绘了属于传输系统运营商(TSO)范围的通信网络的典型体系结构。该体系结构取自第2条,适用于保护和控制工程师(P和C),并描述了用于保护和使用系统保护的访问和使用的网络安全机制,系统完整性

研究@YDSP项目报告 - 新加坡
无人接地车辆(UGV)为传统校园监视方法提供了一种新颖的替代方法,包括手动巡逻和摄像机监视。该项目旨在为校园监视开发低成本,健壮和模块化的UGV,从而使校园安全能够有效地远程监视不同的区域。通过同时本地化和映射算法的使用,UGV能够映射和自动绘制。通过测试,我们确定了UGV的最佳计划和运动控制器在城市环境中运行。之后,UGV在本地执行计算机视觉(CV)任务,以通过使用姿势估计模型来检测其视线中的任何潜在入侵者。检测到的入侵者的图像将通过另一个姿势分类模型通过,以确定任何其他可疑运动。
Sun Smart系列MPPT太阳能电荷控制器-Systek
i介绍了第三代Sun Smart系列MPPT太阳能电荷控制器,这是Systek设计和开发的尖端解决方案。此高级电荷控制器使用了快速,精确的创新最大点跟踪(MPPT)算法。太阳智能太阳能电荷控制器具有无风扇的套管,可抵抗灰尘和水,确保寿命更长。它能够在混合模式操作中控制任何逆变器,即使在没有太阳能的情况下,也可以充电。它还可以为在DC功率上运行的电器提供直流输出,同时保护电池免于过电。最多可以平行连接四个太阳智能太阳能电荷控制器,以增加电流和大电池的当前容量。其可选的WiFi功能允许远程监视其操作。它是最通用,最可靠的太阳能电荷控制器之一,具有许多在其他功能中的功能。

空对地传播信道建模调查...
摘要 — 近年来,无人机 (UAV) 的使用急剧增加,尤其是小型无人机,因为它们价格实惠、易于获得且易于操作。无人机的现有和未来应用包括远程监视和监控、救援行动、包裹递送和通信回程基础设施。此外,无人机被视为 5G 及更高版本无线技术的重要组成部分。无人机的独特应用场景需要准确的空对地 (AG) 传播信道模型来设计和评估用于控制/非有效载荷以及有效载荷数据传输的无人机通信链路。与地面传播模型相比,这些 AG 传播模型尚未得到详细研究。本文全面概述了可用的 AG 信道测量活动、大规模和小规模衰落信道模型、它们的局限性以及无人机通信场景的未来研究方向。索引术语 — 空对地 (AG)、信道测量、信道建模、无人机、大规模和小规模衰落、探测、无人机 (UAV)。