XiaoMi-AI文件搜索系统
World File Search System连续

聚氨酯的连续聚合物合成和生产
通过自动化启用Johann L. Rapp†§,Meredith A. Borden†§,Vittal Bhat†,Alexis Sarabia†,Alexis Sarabia†和Frank A. Leibfarth† *§添加剂制造,聚氨酯,聚合物网络,半自动批次合成,弹性体

图形光谱和连续量子步行
量子信息及其与组合学的相互作用。本书部分是关于这些问题的进度报告。对我们来说,最大的惊喜是代数图理论的工具在多大程度上被证明是有用的。因此,我们对此比严格必要的更详细。其中有些是标准的,有些是旧的stu效应,有些是新材料(例如,可控性,强烈的既定性顶点),已开发用于处理量子步行。,但组合并不是一切:我们还会遇到谎言组,数字理论的各种范围以及几乎是周期性的功能。(因此,第二个惊喜是与我们的主题纠结的不同数学领域的数量。)我们不处理离散的量子步行。我们不处理量子算法或量子计算,也不处理有关综合性,误差校正,非本地游戏和量子电路模型的问题。我们讨论了一些相关的物理学。我们专注于在数学上有趣且具有一些物理意义的问题,因为这种重叠通常是结果的迹象。我们对许多人的这些笔记都有了有用的评论,包括戴夫·维特·莫里斯(Dave Witte Morris),蒂诺·塔蒙(Tino Tamon),萨沙·朱里什(SashaJurišic)及其研讨会成员,亚历克西斯·亨特(Alexis Hunt),戴维·费德(David Feder),亨利·刘(Henry Liu),和谐Zhan,尼古拉斯·莱(Nicholas Lai),张张。。。。

通过连续增强的分布式量子传感......
摘要 分布式传感协议使用局部传感节点网络来估计网络的全局特征,例如局部可检测参数的加权平均值。在无噪声情况下,节点共享的连续变量 (CV) 多体纠缠可以提高参数估计的精度,相对于没有共享纠缠的网络所能达到的精度;对于纠缠协议,均方根估计误差随传感节点的数量 M 而呈 1 / M 的比例变化,即所谓的海森堡缩放比例,而对于没有纠缠的协议,误差则呈 M 1 的比例变化。然而,在存在损耗和其他噪声源的情况下,虽然多体纠缠在感测位移和相位方面仍然具有一些优势,但精度随 M 的比例变化并不那么有利。在本文中,我们表明使用 CV 纠错码可以增强传感协议对缺陷的鲁棒性,并恢复海森堡缩放比例至中等 M 值。此外,之前的分布式传感协议只能测量单个正交,而我们构建了一个可以同时感测两个正交的协议。我们的工作证明了 CV 误差校正码在现实传感场景中的价值。

模拟表面张力的连续方法*
已经开发出一种用于模拟表面张力对流体运动影响的新方法。不同性质或“颜色”流体之间的界面表示为有限厚度的过渡区域,颜色变量在该区域内连续变化。在过渡区域的每个点,定义一个力密度,该力密度与该点恒定颜色表面的曲率成比例。它被归一化,以便当局部过渡区域厚度与局部曲率半径之比趋近于零时,恢复界面上表面张力的常规描述。连续方法消除了界面重建的需要,简化了表面张力的计算,能够精确模拟由表面力驱动的二维和三维流体流动,并且不会对具有表面张力的流体界面的数量、复杂性或动态演变施加任何建模限制。给出了二维流动的计算结果以说明该方法的特性。
通过连续增强分布式量子传感......
摘要 分布式传感协议使用局部传感节点网络来估计网络的全局特征,例如局部可检测参数的加权平均值。在无噪声情况下,节点共享的连续变量 (CV) 多体纠缠可以提高参数估计的精度,相对于没有共享纠缠的网络所能达到的精度;对于纠缠协议,均方根估计误差随传感节点的数量 M 而呈 1 / M 的比例变化,即所谓的海森堡缩放比例,而对于没有纠缠的协议,误差则呈 M 1 的比例变化。然而,在存在损耗和其他噪声源的情况下,虽然多体纠缠在感测位移和相位方面仍然具有一些优势,但精度随 M 的比例变化并不那么有利。在本文中,我们表明使用 CV 纠错码可以增强传感协议对缺陷的鲁棒性,并恢复海森堡缩放比例至中等 M 值。此外,之前的分布式传感协议只能测量单个正交,而我们构建了一个可以同时感测两个正交的协议。我们的工作证明了 CV 误差校正码在现实传感场景中的价值。

矿井连续运输导航传感器
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。
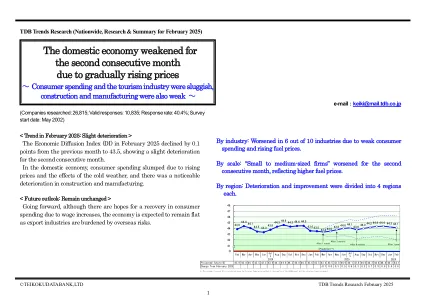
连续第二个国内经济削弱了...
*业务信心(最新在3个月内,在6个月内,在1年内) *业务状况(销售,购买和销售单位价格,库存,库存,容量利用率,员工人数,加班工作时间)3。研究期间和基于互联网的调查2月14日至2825年28 2025年对经济扩散研究的统计研究(启动了经济趋势)的解释(启动了经济统计学趋势) 27,000个全国性公司在其一般业务活动中,包括行业业务绩效和运营环境的当前状况和未来前景。这种调查的主要目的是评估日本经济的现状。选择所有国内行业中各种规模的公司公司都有资格参加调查。
矿井连续运输导航传感器
在开采和运输煤炭的过程中,操作员在狭窄的矿井内可能会被移动机械撞击或抓到。解决此问题的方法是使用运输设备上的导航系统,使其跟随开采煤炭的机器。这实际上涉及基于传感器的机器对接。能够承受恶劣的矿井环境(包括灰尘、甲烷气体和水)的传感器起着关键作用。对采矿机的运动和经验机器特性进行计算机分析,以确定操作要求和空间限制,以确保将煤炭正确装入运输设备。这些数据用于选择传感系统。扫描激光系统和超声波传感器等各种技术经常用于其他应用,但被发现不可接受。然而,采用主动目标的近红外 (IR) 传感器满足要求。该传感器具有标称 75 EE 锥形视场和 0.1 至 18.0 m 的范围。对于单目标模式,在 3.56 米的距离处,标称范围精度为 4.3%。生成了校正算法,将误差降低至 0.6%。空气中的灰尘测试表明,在超过联邦法律允许的浓度(7.5 倍)的水平下,精度(最坏情况)下降不到 0.8%。该传感器可以跟踪多个活动目标,提供五个自由度 (DOF) 测量。使用四个目标,标称范围精度为 0.4%,无需校正算法。III. 当前操作场景 拖运系统跟随采矿机的制导系统在商业上不存在。这样的系统可以减少当前拖运采矿设备造成的死亡和伤害,并且是当前拖运控制的可行替代方案。

基于得分的连续时间离散diffu
通过随机微分方程(SDE)基于得分的建模已对扩散模型有了新的视角,并在连续数据上证明了出色的绩效。但是,log-likelihood函数的梯度,即,分数函数未正确定义用于离散空间。这使得将基于得分的建模调整为分类数据并不乏味。在本文中,我们通过引入随机跳跃过程将反向过程通过连续的Markov链进行反向过程来扩散变量。此公式在向后采样期间接受分析模拟。要学习反向过程,我们将分数匹配扩展到一般的分类数据,并表明可以通过简单的条件边缘分布来获得公正的估计器。我们演示了构成方法在一组合成和现实世界的音乐和图像基准中的有效性。

万古霉素 - 连续输注方案
在500 mg小瓶中加入10 ml的水以使50 mg/ml溶液进一步稀释上述溶液的5 ml(250 mg万古霉素),并添加45 ml葡萄糖5%或氯化钠0.9%,最终浓度为50 ml,最终浓度为5 mg/ml。1g小瓶加入20 ml的水以向1G小瓶注入,以使50 mg/ml溶液进一步稀释上述溶液的5 ml(250 mg万古霉素),并添加45 ml葡萄糖5%或氯化钠0.9%,最终浓度为50 mL,最终浓度为5毫升5 mg/ml。特殊情况(10 mg/ml浓度 - 只能通过中心线给出),以便于限制液体的婴儿,可以将万古霉素稀释至10 mg/ml的浓度,准备10 mg/ml浓度,使用500mg vial加入10 ml的水,以使500毫克的溶液和500毫克的溶液和500 mL的溶液(500 mL)的溶解度(500 mL)(500 mL)(500 mL)(500 mL)加入40毫升葡萄糖5%或氯化钠0.9%,最终体积为50 mL,最终浓度为10 mg/ml。使用1G瓶中准备10 mg/ml浓度,向1G小瓶注入20 ml水以使50 mg/ml的溶液进一步稀释上述溶液的10 ml(500 mg万古霉素),并加入40 ml葡萄糖5%或氯化物0.9%,以达到50 mL的最终浓度为50 ml/MON/MON的最终浓度为50 mL/MM。给药加载剂量:IV输注一小时。