XiaoMi-AI文件搜索系统
World File Search System遮篷

Vesper Sparrow 清洁能源有限责任公司
Vesper Sparrow Clean Energy, LLC,一家特拉华州有限责任公司(“公司”)。该公司是 NineDot Energy, LLC(“NineDot”)的全资子公司。NineDot 是社区规模清洁能源设施的开发商和运营商。该公司正在寻求与拆除、建造和配备两个电池储能系统相关的财务援助,每个系统的估计容量为 4.8 兆瓦 (MW),由电池和设备混凝土垫组成,包括变压器、配电盘和计量器,每个系统的储能容量为 19.2 MW 小时(统称为“电池系统”),以及位于与电池系统相连的开关设备建筑物屋顶上的太阳能天篷系统,由太阳能电池板、逆变器和电力收集系统组成,估计太阳能发电总量为 200 千瓦时(“太阳能系统”)。电池系统和太阳能系统总面积约为 2,690 平方英尺,位于纽约布鲁克林 Flatbush 大道 2138-48 号一块 14,000 平方英尺的地块上(简称“设施”)。该设施将归公司所有,并作为电池储能系统以及与电池系统相连的太阳能系统运营,电池储能系统能够从纽约电网充电和放电。
第 61 号远征
远征 61 号徽章代表着国际空间站上激动人心、充满活力的时刻,因为它不断向着太空的无限未来前进。徽章的整体视图是从一艘正在追赶空间站的飞行器上拍摄的。太阳是徽章中最突出、最核心的元素,它是地球、空间站和整个太阳系的能量和生命之源。作为人类航天的当前焦点,空间站位于徽章的中心,其微小的阴影几乎遮住了太阳,提醒我们人类的探索只是我们探索宇宙的一小部分。太阳的 15 道光芒代表空间站计划的 15 个原始合作伙伴,而第 16 道光芒代表着继续与新合作伙伴合作的公开邀请。四条黄色光芒构成了指南针的基本方向,象征着人类与生俱来的探索动力。前进的终结者代表着地球新一天的黎明。名称环仿佛漂浮在太空中,没有单一的方向,强调了国际团队为完成一项任务而团结起来的多种观点。名称环外延伸出九条射线,代表人类九次勇敢探索近地轨道以外空间的任务,从而鼓励我们无拘无束地驶向太阳系。
使用高光谱IMA
高光谱摄像机,即能够在各种波长中捕获图像的传感器,最近已添加到可用于植物遗传学和繁殖应用的表型工具领域中。据报道,植物檐篷的高光谱特征与植物营养状况有关(Cilia等,2014; Mahajan等,2016),与植物生长相关的特征(Kaur等,2015; Yang&Chen,2004; Yang&Chen,2004),植物生物量(Jia et al。 Thomas等,2017),Geno-type Intication(Chivasa等,2019),叶水含量(Ge等,2016)和土壤微生物群落组成(Carvalho等,2016)。特别是,高通知数据驱动的数据驱动的复杂性状预测,也称为现象预测,是一个积极的和连续表型的积极研究主题(Cuevas等,2019; Edlich-Muth et al。,2016; Krause等,2016; Krause等,2019; Krause et al。,2019; Rincent et and and and and and and an an an an an an an an an an an an an an an an。现象性预测有望捕获植物的分子组成,例如生物化学或生理信号(内型),影响基因组预测可能无法直接解释的表型(Rincent等人,2018年)。高度反射率数据可用于评估植物生长或应力相关的表型,以响应PGPB接种。

创新者图书馆
电源 智能、低成本插座和平台 ✓ 监控和减少办公室和插入式能源使用 适用于兆瓦应用的热电池解决方案 ✓ 零碳工业热 灵活轻型薄膜太阳能光伏 ✓ 车用太阳能 创新型长时液流电池存储 ✓ 比锂离子更长的供电时间 灯柱/柱式安装小型风力涡轮机 ✓ 获取可再生能源发电 双面太阳能天篷 ✓ 最大限度地利用停车场和人行道现场发电 模块化电池系统取代柴油发电机 ✓ 绿色户外活动和建筑活动 面向工业和商业客户的分布式能源存储 ✓ 大规模部署自学习电池系统 智能地面安装太阳能光伏阵列 ✓ 一体化太阳能系统。只需设置、连接和生产清洁能源 轻型太阳能光伏解决方案 ✓ 适用于薄/弱屋顶的太阳能 小型垂直轴风力涡轮机 ✓ 设计用于在城市环境中利用混乱的风 用于农业、工业和微电网的超低排放燃气发电机 ✓ 可使用任何燃气燃料的超低排放燃气发电机
印度技术纺织品行业
9.1 背景 78 9.2 农业技术 82 9.2.1 防冰雹和防鸟网 84 9.2.2 作物覆盖物 85 9.2.3 渔网 85 9.2.4 覆盖垫 86 9.2.5 遮阳网 86 9.3 建筑技术 87 9.3.1 吸音织物 89 9.3.2 建筑膜 89 9.3.3 遮阳篷和天篷 90 9.3.4 帆布篷布 91 9.3.5 HDPE 篷布 91 9.3.6 围板和标牌 91 9.3.7 脚手架网 92 9.4 布料技术 93 9.4.1 弹性窄带 95 9.4.2 钩环扣件96 9.4.3 衬布 96 9.4.4 标签和徽章 97 9.4.5 花边和带子(处理/涂层) 97 9.4.6 专用和工业缝纫线 97 9.4.7 雨伞布(TT 组件) 98 9.4.8 拉链带(TT 组件) 98 9.5 土工技术 99 9.5.1 土工织物 101 9.5.2 土工膜 102 9.5.3 土工网、土工格栅和土工条 103 9.5.4 土工复合材料 104 9.5.5 土工布管 104 9.5.6 土工垫 105 9.5.7 土工格室 106

Yong,K。E.,Hui Kieu,D.K.,Goh,Y.K.,Zhang,X. 一个基于空间状态的Omni方向碰撞警告... 细胞外囊泡及其缺血性中风中的microRNA货物 使用3D多孔结构的超级电容器的开发 近距离光学天空理论 反复练习的反复发作的运动单位行为的变化 生物信息学中的简报 生成AI驱动的语义通信网络 强化学习的基于大语言模型的基于州奖励和行动建模的建议系统 辐射测量
摘要 - 马拉里亚是由感染雌性蚊子蚊子的寄生虫引起的,是一种严重的且潜在的致命疾病,是热带地区常见的。疾病控制程序依赖于树冠内各种垂直高度的蚊子的捕获。为了支持这种疟疾控制研究工作,该提议的解决方案旨在克服涉及攀岩和手动蚊子捕获的调用方法的局限性。本文介绍了一种新型无人机导航系统的开发,该系统旨在在树冠中收集蚊子样品。我们的解决方案通过使用立体声视觉深度摄像机和对象检测算法yolov7实现3D映射算法来构建解决方案,以准确识别树檐篷中的栖息地。开发的无人机导航算法采用获得的坐标来计划合适的飞行路径。我们评估了基础针孔摄像头模型的准确性,并进行了深度摄像头的校准,以提高深度精度。此外,我们分析了Yolov7培训配置,以最大程度地减少着陆点检测中的假阳性。结果证明了我们解决方案在捕获各种垂直高度的蚊子方面的有效性,为疟疾控制程序提供了宝贵的支持。索引术语 - 马拉里亚控制,计算机视觉,无人机导航,深度摄像头,机器学习
奥兰治县 FMD 特别服务大楼 1944 HVAC...
该项目涉及:为设施大楼安装外部地面安装的封装式 DX 系统,以提供专用的调节室外空气,将安装一个由单个冷凝机组和十五 (15) 个风机盘管机组组成的新型可变制冷剂流量 (VRF) DX 系统,为设施管理大楼提供调节空气。为整个建筑服务的所有送风和回风管道都将被拆除和丢弃。新的 HVAC 单元缩小版的 BAS 应连接到现有的主楼宇自动化系统。该项目的拟议建筑范围包括对现有建筑进行内部装修,包括卫生间、休息室、装修、木制品和入口改进。作为入口改进的一部分,范围还包括增加外部再制造天篷系统。在建筑物入口处增加了一条排水沟,并重新平整了场地。现有设施管理大楼将腾空,但锁匠区除外,该区域在施工期间仍将保持运营。电气工作包括拆除和丢弃所有现有配电板。将安装两个新配电板并重新连接现有电路。设施管理大楼内的所有照明设备(锁匠区和发电机区除外)都将被拆除,并更换为新的 2'x2' LED 照明。
为什么你应该接种 COVID-19 疫苗
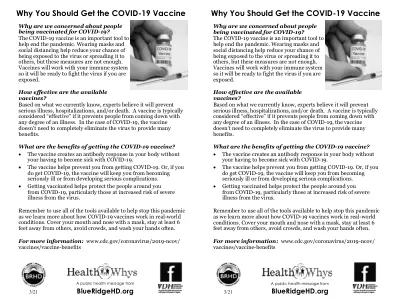
为什么我们担心人们接种 COVID-19 疫苗?COVID-19 疫苗是帮助结束大流行的重要工具。戴口罩和保持社交距离有助于减少您接触病毒或将其传播给他人的机会,但这些措施还不够。疫苗将与您的免疫系统协同作用,因此如果您接触到病毒,它将随时准备对抗病毒。现有的疫苗有多有效?根据我们目前所知,专家认为它可以预防严重疾病、住院和/或死亡。如果疫苗可以防止人们患上任何程度的疾病,则通常被认为是“有效的”。就 COVID-19 而言,疫苗不需要完全消灭病毒即可提供许多好处。接种 COVID-19 疫苗有什么好处? 疫苗会在您的体内产生抗体反应,而您无需感染 COVID-19。 疫苗有助于预防您感染 COVID-19。或者,如果您确实感染了 COVID-19,疫苗将防止您患上重病或出现严重并发症。 接种疫苗有助于保护您周围的人免受 COVID-19 的侵害,尤其是那些因病毒而患上重病风险较高的人。 请记住,在我们进一步了解 COVID-19 疫苗在现实条件下如何发挥作用的同时,使用所有可用的工具来帮助阻止这种流行病。 用口罩遮住口鼻,与他人保持至少 6 英尺的距离,避开人群,并经常洗手。 更多信息:www.cdc.gov/coronavirus/2019-ncov/vaccines/vaccine-benefits
HAFB 大楼 1 和 1A WSEP 重大翻新
C. 结构 希尔空军基地 1 号楼和 1A 号楼改建工程的结构范围包括填充 CMU 墙中的现有开口和现有 CMU 墙中的新开口。新填充物将由与现有墙体尺寸相匹配的 CMU 构成。将安装穿过墙体的钢角过梁,以支撑新开口上方的横梁。将在群众简报室建造新的升高座位。升高座位的平台将由冷弯金属框架和胶合板护套构成。将在 1 号楼的屋顶层安装新梁,以支撑办公室和会议室中新的可移动隔断门。这些梁由现有砖石墙的钢角拱腹和走廊侧的金属螺柱箱柱支撑。该项目包括在 1 号楼和 1A 号楼之间选定的入口处建造新的檐篷。它们将由空心结构钢型材建造。钢柱将由新的钢筋混凝土点基础支撑。作为项目工作范围的一部分,对 1 号楼和 1A 号楼的改造部分进行了简单的抗震结构评估。将报告建筑剪力墙的需求/容量比和其他缺陷。实际的抗震升级工作不在项目范围内。

通过3D形状完成在混乱环境中改善机器人水果收获
摘要 - 世界人口正在增加,到2050年,其对食物,饲料,燃料和纤维的需求几乎一倍。面临环境挑战,劳动力短缺也对农业生产系统构成了至关重要的挑战。农作物生产中手动任务的自动化可能会提高效率,但也会导致农业实践的变化,以更有效地使用可用的土地。在本文中,我们解决了在具有挑战性的现实情况下(例如垂直农场)的机器人果实收获的问题,在垂直农场中,机器人感应和表演需要应对杂乱无章的环境。机器人果实的收获通常是通过直接检测传感器读数中的掌握点来完成的,传感器读数可以根据农作物收获的要求在果实本身或其花梗上进行。然而,掌握点检测并不总是可能的,因为理想的抓紧点可能隐藏在叶子或其他水果后面。我们的方法利用了形状的完成技术,使我们能够估算目标果实的完整3D形状,即使在强烈的遮挡下,它的姿势也可以估算其姿势。以这种方式,即使只有部分可见,我们也可以估计一个掌握点。我们评估了在一个真正的机器人操纵器中运行在垂直农场中的实际机器人操纵器,并采用不同的收获工具。我们的实验表明,与最竞争的基线相比,我们提议的管道平均将成功率提高了18.5个百分点,而不是依赖形状完成的基线。