机构名称:
¥ 1.0
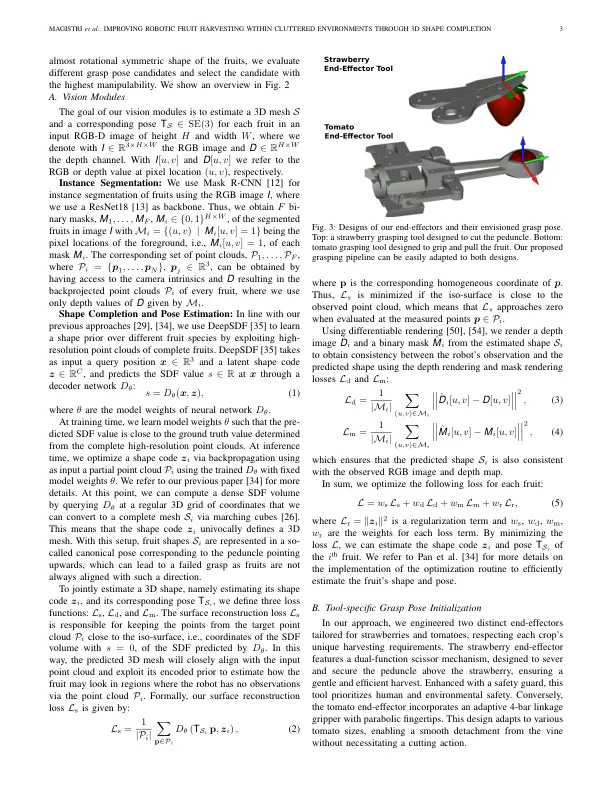
摘要 - 世界人口正在增加,到2050年,其对食物,饲料,燃料和纤维的需求几乎一倍。面临环境挑战,劳动力短缺也对农业生产系统构成了至关重要的挑战。农作物生产中手动任务的自动化可能会提高效率,但也会导致农业实践的变化,以更有效地使用可用的土地。在本文中,我们解决了在具有挑战性的现实情况下(例如垂直农场)的机器人果实收获的问题,在垂直农场中,机器人感应和表演需要应对杂乱无章的环境。机器人果实的收获通常是通过直接检测传感器读数中的掌握点来完成的,传感器读数可以根据农作物收获的要求在果实本身或其花梗上进行。然而,掌握点检测并不总是可能的,因为理想的抓紧点可能隐藏在叶子或其他水果后面。我们的方法利用了形状的完成技术,使我们能够估算目标果实的完整3D形状,即使在强烈的遮挡下,它的姿势也可以估算其姿势。以这种方式,即使只有部分可见,我们也可以估计一个掌握点。我们评估了在一个真正的机器人操纵器中运行在垂直农场中的实际机器人操纵器,并采用不同的收获工具。我们的实验表明,与最竞争的基线相比,我们提议的管道平均将成功率提高了18.5个百分点,而不是依赖形状完成的基线。
通过3D形状完成在混乱环境中改善机器人水果收获
主要关键词




相关文件推荐