XiaoMi-AI文件搜索系统
World File Search System闭门
CPS HR 董事会 - 会议议程
下一财年预算和战略计划——待批准 董事会官员选举(每两年一次)——即将于 2024 年、2026 年等或根据需要举行——待批准 董事会发展委员会、执行委员会和财务审计委员会成员的年度任命——待批准 下一财年投资政策——待批准 授权/签约权(批准)(如有需要) 财年战略计划和成就——供参考和讨论(仅限差异) 年度多元化报告——供参考(逐年表现) 客户满意度调查数据(供参考) 紧急继任计划——从 2018 年开始,每两年由董事会审查和更新以供批准。 高管绩效计划成就——讨论/闭门会议 下一财年高管绩效计划——讨论/接受/闭门会议
议程 内华达州建筑、室内设计和住宅设计委员会 日期:2024 年 6 月 5 日 地点:特拉基草地社区学院 W
1. Francisco Castellanos Pulido 上午 10:00 4. 审查并可能批准 David Hopp 先生根据 NAC 623.505(11) 参加住宅设计考试的申请 [可能采取的行动] 5. 考虑并可能采取行动,建议为 Bach、Hatfield、Harrison、Hernandez 和 Quenga 员工支付工资。[注意:委员会可以根据 NRS 241.030 进入闭门会议,因为讨论可能涉及员工的性格、涉嫌不当行为、专业能力或类似事项,但委员会不得进入闭门会议讨论 Harrison 女士的性格、涉嫌不当行为、专业能力或类似事项。][可能采取的行动] 6. 执行 A. 案件陈述 – 讨论和决定和解协议 [可能采取的行动]:
2022 – 2026 年战略计划
然而,机会仍然存在。疫情进一步暴露了我们社会中的种族不平等。我们看到更多关于种族主义的讨论是公开的,而不是闭门进行的。我们看到更多的同事为种族正义发声。我们看到少量的资源被重新分配给受到历史伤害影响的社区。
下午 6:00 考夫曼市政厅 华盛顿南路 209 号
7. A. 第 551.087 节 关于经济发展谈判的审议;闭门会议。(1)讨论或审议政府机构从某个商业前景获得的商业或财务信息,该政府机构希望在该政府机构领土内或附近落户、驻留或扩张,并且政府机构正在与其进行经济发展谈判;或(2)审议向第(1)款描述的商业前景提供财务或其他激励措施:项目 Lock Box、Bluebonnet、Lego、Elsie、Forest、Razorback、Cowbell、Sunshine、Snooze、Blue、Orange、Home Run、Big Event;Downtown Square 地产;KEDC 拥有的地产;地块编号 #426、188001、3871、16826、190536、16821、79084、16829、16832、3876、5404、202751、202752、202753、219551 B. 第 551.072 节。关于不动产的审议;闭门会议。审议有关以下不动产的购买、交换、租赁或估价:KEDC 拥有的房产;Range、Prairie 项目;地块编号 #49240、5313、5388、5487、50066、50080、50072


IPS 闭门圆桌会议探讨以资产为基础的社区发展如何促进健康和福祉:“是什么让我们能够做到?” 作者:Shaw Wen Xuan、Charmaine Tay
其次,蔡女士区分了“认同”和“所有权”,这两者都是获得社区支持所必需的。前者需要让其他人相信该计划的价值,这样他们就不会干扰社区所创造的一切,而后者则是鼓励居民积极主动地提出想法、做出决定并动员周围的人根据这些想法和决定采取行动。要培养居民的主人翁精神,倾听社区及其需求至关重要。蔡女士建议组织不要太快放弃社区拒绝的想法,而是要研究每一次拒绝传达了居民对社区的愿景。认同和所有权应该同时实现,这样 ABCD 才能蓬勃发展。

武装部队部长塞巴斯蒂安·勒科努的议程
下午 2:00——国防和武装部队委员会、外交委员会和经济事务委员会举行闭门联合听证会,讨论政府向议会提交的有关法国武器和两用产品出口的年度报告。出席会议的有:经济、财政、工业和数字主权部长代表(负责工业) Roland Lescure 先生,以及欧洲和外交部长代表(负责对外贸易、吸引力和海外法国公民) Olivier Becht 先生。国民议会

会议记录 - 科学顾问委员会和国家癌症咨询委员会第 16 次联席会议
美国国家癌症研究所 (NCI) 科学顾问委员会 (BSA) 和国家癌症咨询委员会 (NCAB) 于 2024 年 6 月 12 日在马里兰州贝塞斯达国立卫生研究院 (NIH) NCI Shady Grove 校区东翼 TE406 会议室召开第 16 次联席会议。会议于 2024 年 6 月 12 日星期三上午 8:30 至下午 3:52 向公众开放,并于 2024 年 6 月 12 日星期三下午 4:00 至下午 4:53 对公众闭门。NCAB 主席、综合癌症中心主任、希望之城贝克曼研究所所长兼首席科学官 John D. Carpten 博士和 BSA 主席、北卡罗来纳大学 (UNC) Lineberger 综合癌症中心主任兼北卡罗来纳大学教堂山分校癌症护理中心主任 Shelton Earp 博士主持了公开会议。Carpten 博士主持了闭门会议。在公开会议上,BSA 审议了新的申请请求 (RFA)、合作协议 (Coop. Agr.)、提案请求 (RFP) 和计划公告,并特别接收、转介和/或审查 (PAR) NCI 项目人员提出的新概念和重新发布的概念。
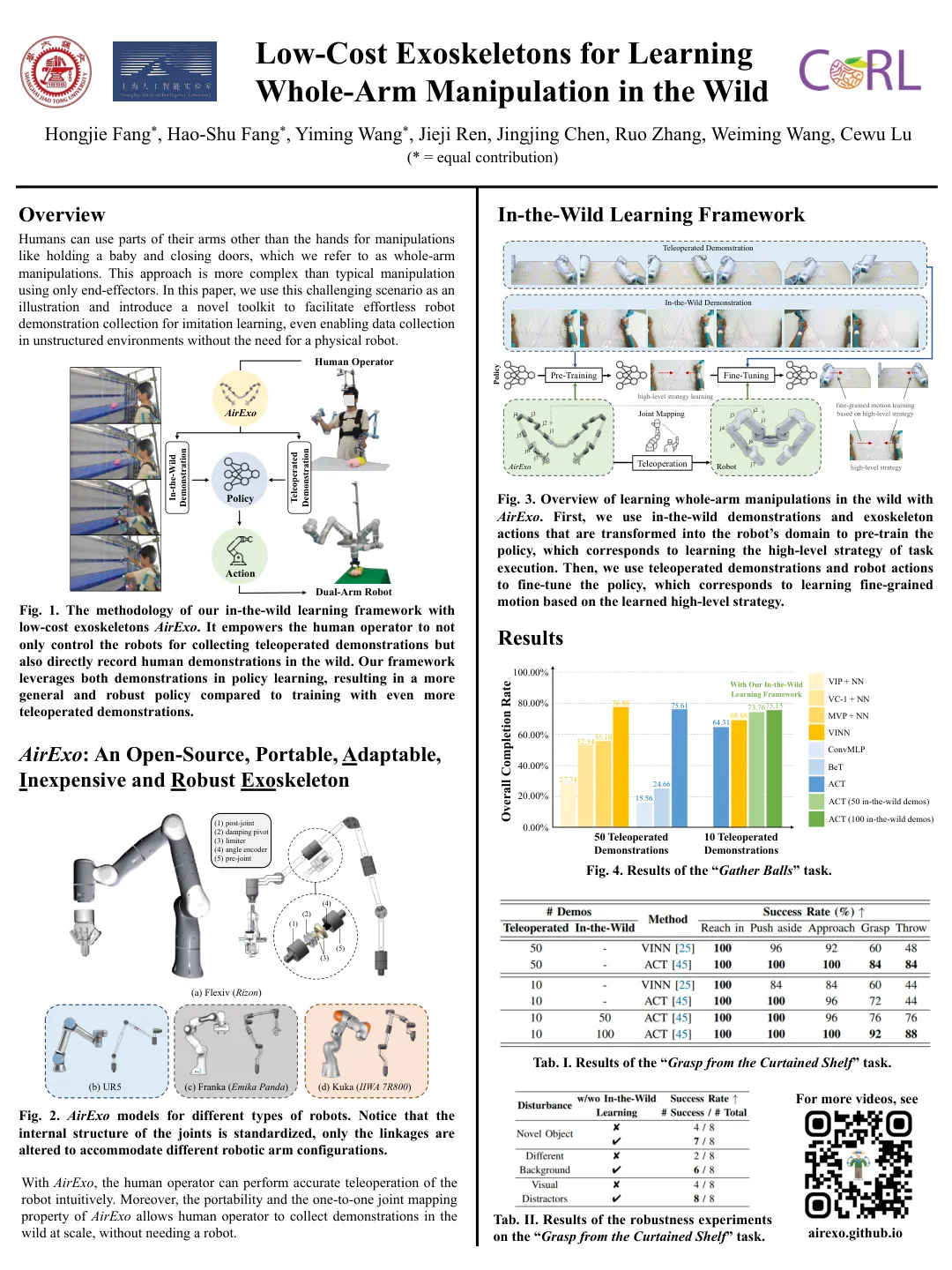
低成本外骨骼用于学习野生武器的全臂操纵
人类可以使用手臂的一部分,而除了握住婴儿和闭门的操作,我们称之为全臂操纵。这种方法比仅使用最终效应的典型操作更为复杂。在本文中,我们将这种具有挑战性的场景用作插图,并引入一种新颖的工具包来促进轻松的机器人演示收集以模仿学习,甚至可以在无需物理机器人的情况下在非结构化环境中启用数据收集。