机构名称:
¥ 1.0
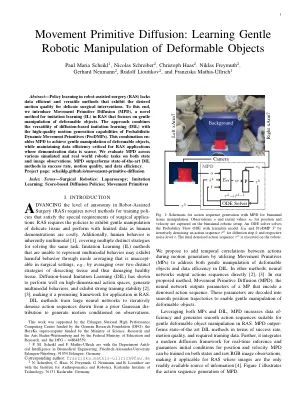
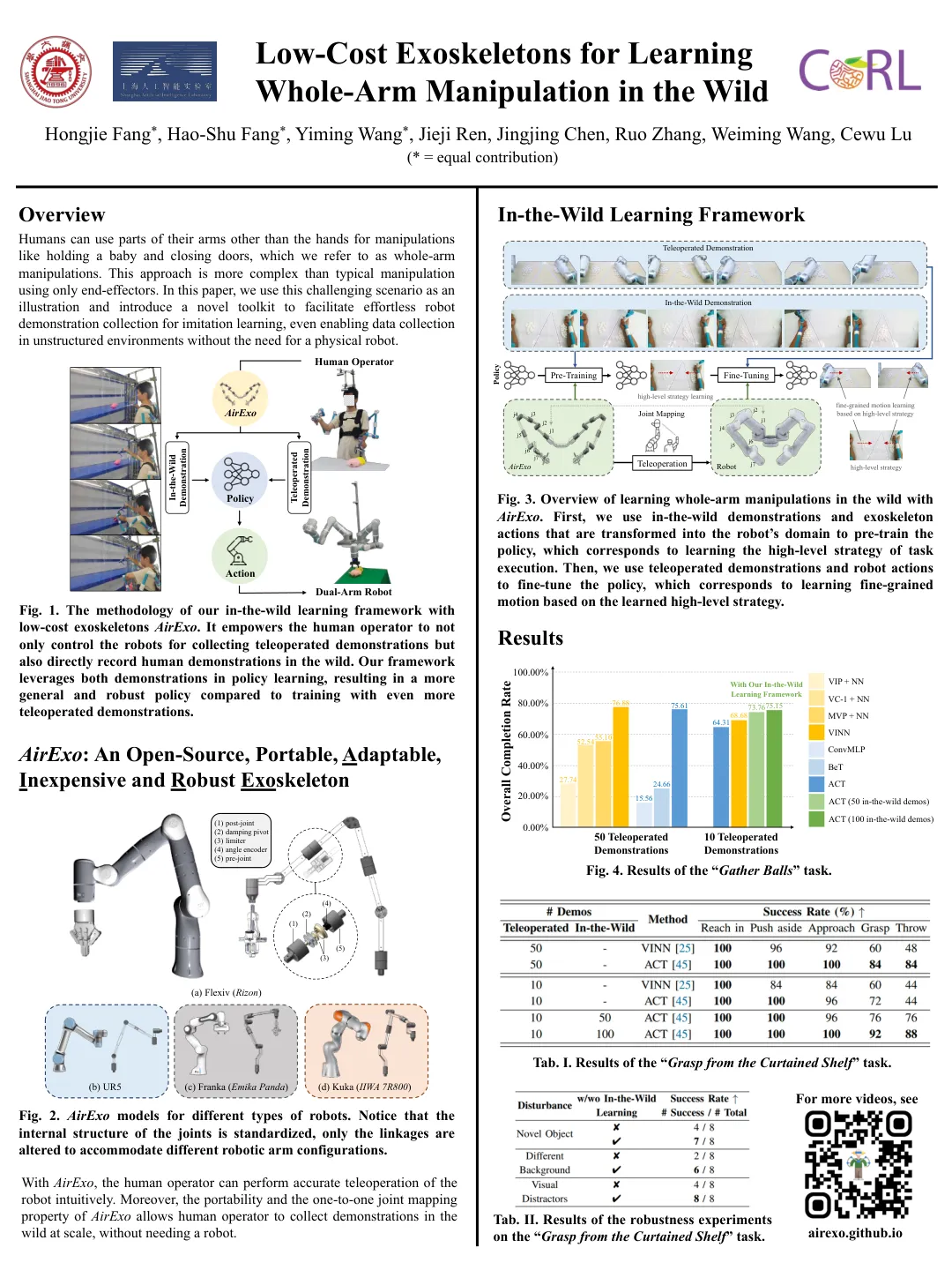
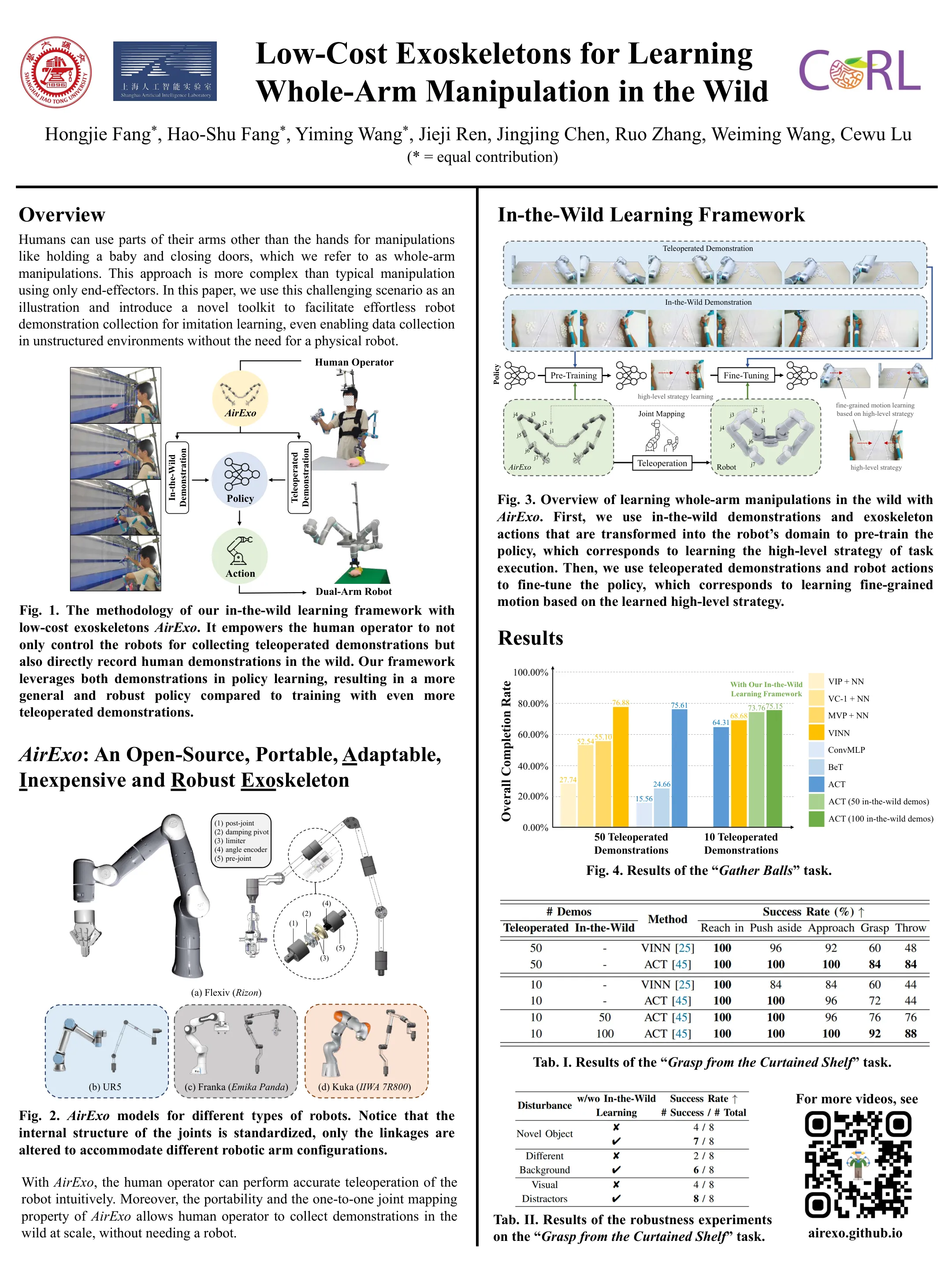
人类可以使用手臂的一部分,而除了握住婴儿和闭门的操作,我们称之为全臂操纵。这种方法比仅使用最终效应的典型操作更为复杂。在本文中,我们将这种具有挑战性的场景用作插图,并引入一种新颖的工具包来促进轻松的机器人演示收集以模仿学习,甚至可以在无需物理机器人的情况下在非结构化环境中启用数据收集。
低成本外骨骼用于学习野生武器的全臂操纵
主要关键词
相关文件推荐