XiaoMi-AI文件搜索系统
World File Search System阿灵顿
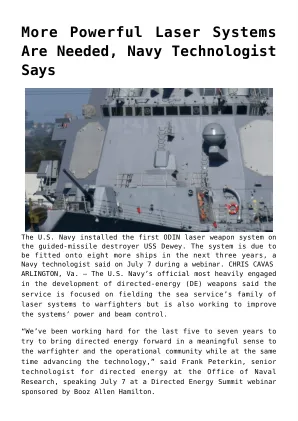
海军技术专家称需要强大的激光系统
美国海军在导弹驱逐舰杜威号上安装了第一套 ODIN 激光武器系统。海军技术专家 7 月 7 日在一次网络研讨会上表示,该系统将在未来三年内安装在另外八艘舰船上。克里斯·卡瓦斯 弗吉尼亚州阿灵顿 — 最积极参与定向能 (DE) 武器开发的美国海军官员表示,该部门专注于向作战人员部署海上部门的激光系统系列,但也在努力提高系统的功率和光束控制。

美国海军乐团音乐会/礼仪乐团大号试奏 2022 年 10 月 13 日
海军首屈一指的音乐会/礼仪乐队位于华盛顿特区,由 85 名世界级音乐家组成,他们轮流担任音乐会和礼仪职务。近 100 年来,音乐会乐队在全国巡演、公共音乐会和教育会议上演奏了进行曲、爱国曲目、管弦乐曲和现代管乐合奏曲目。礼仪乐队在官方军事和政府活动以及其他特殊活动中演奏音乐,包括在白宫、五角大楼和阿灵顿国家公墓举行的仪式。

美国海军乐团音乐会/礼仪乐团长笛试奏 2022 年 10 月 3 日
海军首屈一指的音乐会/礼仪乐队位于华盛顿特区,由 85 名世界级音乐家组成,他们轮流担任音乐会和礼仪职务。近 100 年来,音乐会乐队在全国巡演、公共音乐会和教育会议上演奏了进行曲、爱国曲目、管弦乐曲和现代管乐合奏曲目。礼仪乐队在官方军事和政府活动以及其他特殊活动中演奏音乐,包括在白宫、五角大楼和阿灵顿国家公墓举行的仪式。

美国海军乐团音乐会/礼仪乐团大号试奏 2023 年 2 月 6 日
海军首屈一指的音乐会/礼仪乐队位于华盛顿特区,由 85 名世界级音乐家组成,他们轮流担任音乐会和礼仪职务。近 100 年来,音乐会乐队在全国巡演、公共音乐会和教育会议上演奏了进行曲、爱国曲目、管弦乐曲和现代管乐合奏曲目。礼仪乐队在官方军事和政府活动以及其他特殊活动中演奏音乐,包括在白宫、五角大楼和阿灵顿国家公墓举行的仪式。
AWS-A2.4 采用通知 - ASSIST-QuickSearch
AWS-A2.4,“焊接、钎焊和无损检测,标准符号”,于 1986 年 11 月 21 日被国防部 (DoD) 采用。国防部活动提出的变更必须提交给国防部采纳活动:海军海上系统司令部指挥官,SEA 03R42,2531 Jefferson Davis Highway,阿灵顿,VA 22242-5160。可以从美国焊接学会购买此文件的副本,地址为 550 NW LeJeune Road Miami,佛罗里达州,美国,33126。http://www.amweld.org/ ____________________________________

TagoreTech 任命 Mark J. Lachiw 为高级质量和供应链经理
TagoreTech 成立于 2011 年 1 月,致力于开发用于高功率射频 (RF) 应用的硅基氮化镓 (GaN-on-Si) 半导体技术。TagoreTech 是一家无晶圆厂半导体公司,在美国伊利诺伊州阿灵顿高地和印度加尔各答设有设计中心。我们的研发团队致力于利用宽带隙技术开发颠覆性解决方案,为我们的客户带来显著的尺寸、重量和功率 (SWaP) 优势。如需了解更多信息,请访问 www.tagoretech.com
个人简介 Christine A. Hassselius
• 2023 年 8 月 – 至今:美国陆军企业服务局副局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2023 年 3 月 – 2023 年 8 月:美国陆军企业服务局代理执行局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2023 年 1 月 – 2023 年 3 月:美国陆军企业服务局副局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2020 年 8 月 – 2022 年 12 月:美国司法部哥伦比亚特区检察官办公室行政官,华盛顿特区 • 2016 年 8 月 – 2020 年 8 月:陆军出版局保障部主任、陆军部长行政助理办公室 (OAA),弗吉尼亚州贝尔沃堡 • 2009 年 11 月 – 2016 年 8 月:陆军多媒体和视觉信息局作战支援和分析服务部主任, OAA,五角大楼,华盛顿特区 • 2007 年 6 月 – 2009 年 2 月:管理与项目分析师,监察长办公室,欧洲海军司令部,意大利那不勒斯 • 2006 年 9 月 – 2007 年 6 月:美国陆军志愿者,意大利那不勒斯 • 2001 年 5 月 – 2004 年 1 月:会员与营销总监;燃气用具制造商协会,弗吉尼亚州阿灵顿 • 2000 年 2 月 – 2001 年 5 月:军事分析师与项目经理;科尔曼研究公司/L3,弗吉尼亚州阿灵顿
传记
• 2023 年 8 月 – 至今:美国陆军企业服务局副局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2023 年 3 月 – 2023 年 8 月:美国陆军企业服务局代理执行局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2023 年 1 月 – 2023 年 3 月:美国陆军企业服务局副局长、首席信息官办公室,弗吉尼亚州贝尔沃堡 • 2020 年 8 月 – 2022 年 12 月:美国司法部哥伦比亚特区检察官办公室行政官,华盛顿特区 • 2016 年 8 月 – 2020 年 8 月:陆军出版局保障部主任、陆军部长行政助理办公室 (OAA),弗吉尼亚州贝尔沃堡 • 2009 年 11 月 – 2016 年 8 月:陆军多媒体和视觉信息局作战支援和分析服务部主任, AHS、OAA、五角大楼、华盛顿特区 • 2007 年 6 月 – 2009 年 2 月:管理与项目分析师、监察长办公室、欧洲海军司令部、意大利那不勒斯 • 2006 年 9 月 – 2007 年 6 月:美国陆军志愿者、意大利那不勒斯 • 2001 年 5 月 – 2004 年 1 月:会员与营销总监;燃气用具制造商协会,弗吉尼亚州阿灵顿 • 2000 年 2 月 – 2001 年 5 月:军事分析师与项目经理;Coleman Research Corporation/L3,弗吉尼亚州阿灵顿

准确度、重复性和校准
机器人校准问题:准确性、可重复性和校准 Kevin L. Conrad、Panayiotis S. Shiakolas shiakolas@uta.edu、T. C. Yih 机械和航空航天工程。德克萨斯大学阿灵顿分校自动化与机器人研究所,美国德克萨斯州阿灵顿 76019,shiakolas@uta.edu 摘要。为关节式机器人手臂开发了使用接触式探头的接触校准方法的基础。该解决方案是在基于串行连杆机械手的运动机械设计的机器人当前校准和计量问题中提出的。探索了准确性、可重复性和分辨率,并采取了一种简单的方法。本练习旨在为探索在机器人手臂末端集成商业产品(如力传感器或触发式探头)的可行性奠定基础。确定候选流程和/或应用程序。研究结果表明,准确、可重复且经济高效的在线接触校准方法将是一种理想的解决方案。关键词。机器人精度、重复性、校准、分辨率 1 简介 机器人行业的主要技术障碍之一是减少工具框架和目标框架之间的误差。这种错误的来源很容易确定。控制器和机器人之间的建模差异是造成基座框架和工具框架之间大部分误差的原因。不准确的夹具和制造工艺可以解释工位框架和目标框架之间的差异。这些框架的定义如图所示。1 [1]。

迁移到Quantum加密后量子准备
迁移到Quantum加密量学量子准备时间:密码发现卷B:公共密钥应用程序发现工具的方法,建筑和安全特征William Newhouse Murugiah Souppaya国家标准研究所和技术研究所,马里兰州William Barker Barker Dakota Dakota Dakota咨询公司Maryland Chris nighia nighia nighia nighia nivia karmon juarkan jundia阿灵顿,弗吉尼亚州马克·曼萨诺·桑德盒帕洛阿尔托,加利福尼亚