XiaoMi-AI文件搜索系统
World File Search System预环

通过自我监督的对比预训练
摘要 - 机器人技术的快速发展的领域需要可以促进多种方式融合的方法。具体来说,在与有形对象进行交互时,有效地结合了视觉和触觉感觉数据是理解和导航物理世界的复杂动态的关键,从而使对不断变化的环境的响应更加细微和适应性。尽管如此,在合并这两种感官方式上的许多早期工作都依赖于使用人类标记的数据集的监督方法。本文介绍了MVITAC,这是一种新型方法,它利用对比度学习,以一种自我监督的方式整合视觉和触摸感。通过同时利用两种输入,MVITAC利用内部和模式间损失来学习表示表示,从而增强了材料的属性分类和更熟练的掌握预测。通过一系列实验,我们展示了我们方法的有效性及其优于现有的最先进的自我监督和监督技术。在评估我们的方法论时,我们专注于两个不同的任务:物质分类和掌握成功预测。我们的结果表明,MVITAC促进了改进的模态编码器的发展,从而产生了更强大的表示形式,如线性探测评估所证明的。https://sites.google.com/ view/mvitac/home


生成式AI 进军基因编辑领域
发表在预印本服务器bioRxiv 上 的论文尚未经过专家同行评审。预 计下个月,该公司将在美国基因和细 胞治疗学会年会上提交这篇论文。 与此同时,OpenCRISPR-1 或其变体 在多种生物体(包括植物、小鼠和人 类)中是否都能发挥作用还有待证 明。此外,技术的伦理和安全问题也 需要考虑。但令人兴奋的是,这些突 破性成果为生成式AI 开辟了一条新 途径,将对医学和健康领域产生广泛 影响,有望从根本上改变人们的基因 蓝图。
低环分数下对称环-线性聚合物共混物的应力松弛
摘要:我们结合线性粘弹性测量和建模来探索相同分子量的环状和线性聚合物共混物在环组分体积分数较低(0.3 或更低)范围内的动力学。由于线性链的运动,应力松弛模量受到环和线性组分的约束释放 (CR) 的影响。我们开发了一种基于 CR 的环-线性共混物模型,该模型可以预测环组分分数较低范围内的应力松弛函数,与实验结果高度一致。被线性链缠结所困的环只能通过线性链诱导的 CR 来松弛,而且环的松弛速度比线性链慢得多。预计在环重叠体积分数 ϕ R * 下,共混物的相对粘度 η ( ϕ R * )/ η L 相对于线性熔体粘度 η L 的增加与环分子量 M w,R 的平方根成比例增加。我们的实验结果清楚地表明,通过添加少量环状聚合物,可以同时提高线性聚合物熔体的粘度和结构松弛时间。这些结果不仅为 CR 工艺的物理原理提供了根本性的见解,还提出了通过添加环状聚合物来微调线性聚合物流动性能的方法。

环氧聚酰胺瓷漆(红色)
2天前 — (4)部长秘书处卫生监察长、国防政策局局长和国防采购、技术和后勤局局长(以下简称“国防部暂停局”)应向政府提交规范(目录),并获得事先批准。法规。MIL-C-22750......
页面 - IORA-SA – 环印度洋协会
科技创新是提高生产力和增值的重要驱动力,可以刺激一个国家的增长和竞争力。科技创新的应用对于推动和加速全球转型,使发展中国家和发达国家都实现繁荣、包容和环境可持续的经济。在可持续发展目标框架下,目标的实施充满了许多挑战,需要政策制定者、科技创新界和其他发展专业人士和利益攸关方密切合作。为了有效实施 17 项可持续发展目标中的大部分并实现其既定目标,必须直接或间接地应用科技创新并有适当的重点,特别是在新兴经济体 (EE)、最不发达国家 (LDC) 和小岛屿发展中国家 (SIDS)。
陆地发射 - GEORING(或 GEO 环)
不间断备用电源 ................................................................................................ 5-17 5.2.5 接地和联结 .............................................................................................. 5-18 联结 ................................................................................................................ 5-18 接地 ................................................................................................................ 5-18 6. 陆地发射设施 ............................................................................................................. 6-1 概述 ............................................................................................................................. 6-1 6.1 往返拜科努尔的人员和货物运输 ............................................................. 6-2 克雷尼机场 ............................................................................................................. 6-2 尤比列尼机场 ............................................................................................................. 6-2 航天发射场的运输 ................................................................................................ 6-3 6.2 31 号场地有效载荷处理设施 ............................................................................. 6-4 概述 ............................................................................................................................. 6-4 40/40D 建筑物、PPF .............................................................................
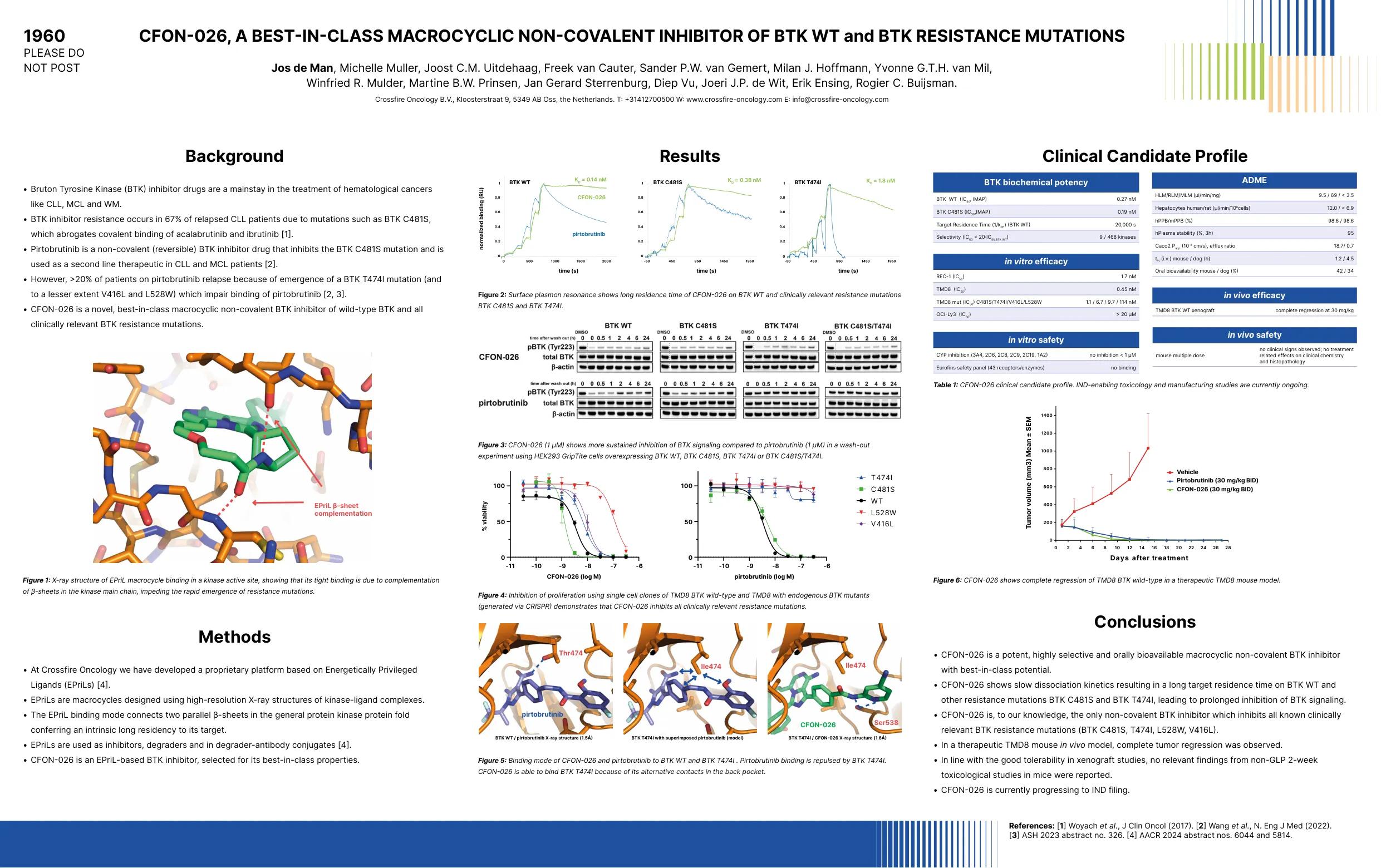
1960 CFON-026,一流的大环非...
Jos The Man,Michelle Muller,Joost C.M. 扩展,凯特(Cauter)的释放,桑德(Sander)P.W. <组,米兰J. Courtfmann,Yvonne G.T.H. Mill,Winfried R. Mulder,Martine B.W. 原则,Jan Gerard Sterrenburg,Deep V.P,Joeri J.P.白人,埃里克·恩(Erik Ensing),罗吉尔·贝斯曼(Rogier C. Bistman)。Jos The Man,Michelle Muller,Joost C.M.扩展,凯特(Cauter)的释放,桑德(Sander)P.W.<组,米兰J. Courtfmann,Yvonne G.T.H.Mill,Winfried R. Mulder,Martine B.W. 原则,Jan Gerard Sterrenburg,Deep V.P,Joeri J.P.白人,埃里克·恩(Erik Ensing),罗吉尔·贝斯曼(Rogier C. Bistman)。Mill,Winfried R. Mulder,Martine B.W.原则,Jan Gerard Sterrenburg,Deep V.P,Joeri J.P.白人,埃里克·恩(Erik Ensing),罗吉尔·贝斯曼(Rogier C. Bistman)。

环氧基复合材料研究论文...
Peth-Naka. Sangli, MH (印度) 摘要。最近,复合材料是使用天然纤维素纤维与基质制备的,由于其稀有性、高比机械强度、可用性、可再生性、可降解性和环境友好性,吸引了研究人员的眼球。这项工作试图形成一个典型的拉伸试验和冲击试验方法的样本,并且材料通常具有更好的机械性能,从而增强了纤维与基质之间的兼容性。复合材料采用环氧树脂基质和剑麻纤维手工铺层法制备。计划对制备的样品进行测量,以测量其机械性能,如耐久性、冲击强度和制备材料的应用。关键词:摩擦、拉伸试验、环氧树脂、剑麻纤维、弯曲。复合材料概述