XiaoMi-AI文件搜索系统
World File Search System飞机飞行

飞机飞行控制系统识别方法...
系统识别方法通过对动态系统的输入和输出进行测量,组成一个数学模型或一系列模型。提取的模型可以表征整个飞机或组件子系统行为(如执行器和机载信号处理算法)的响应。本文讨论了频域系统识别方法在飞机飞行控制系统的开发和集成中的应用。使用频率响应综合识别 (CIFER ® ) 系统识别工具,说明了如何提取和分析从非参数频率响应到传递函数和高阶状态空间表示等不同复杂度的模型。文中展示了艾姆斯研究中心众多飞行和模拟程序的测试数据结果,包括旋翼机、固定翼飞机、先进短距起飞和垂直着陆 (ASTOVL)、垂直/短距起飞和着陆 (V/STOL)、倾转旋翼飞机和风洞中的旋翼实验。对于这一大类系统,实现了出色的系统特性和动态响应预测。示例说明了系统识别技术在提供飞机开发整个生命周期(从初始规格到模拟和台架测试,再到飞行测试优化)的动态响应数据集成流方面的作用。

ACS 类飞机飞行教练
任务 A. 正常起飞和爬升................................................................................................................................ 34 任务 B. 正常进近和着陆............................................................................................................................... 35 任务 C. 软场起飞和爬升(ASEL)......................................................................................................................... 37 任务 D. 软场进近和着陆(ASEL)..................................................................................................... 38 任务 E. 短场起飞和最大性能爬升(ASEL、AMEL)............................................................................. 39 任务 F. 短场进近和着陆(ASEL、AMEL)............................................................................................. 41 任务 G. 受限区域起飞和最大性能爬升(ASES、AMES)............................................................................. 42 任务 H. 受限区域进近和着陆(ASES、AMES)............................................................................................. 44 任务 I. 玻璃水面起飞和爬升(ASES、AMES)............................................................................................. 45 任务 J. 玻璃水面进近和着陆(ASES、AMES)............................................................................................. 46 任务 K.浪高水面起飞和爬升(ASES、AMES)............................................................................................. 47 任务 L. 浪高水面进近和着陆(ASES、AMES)....................................................................................... 49 任务 M. 滑行着陆(ASEL、ASES)....................................................................................................... 50 任务 N. 复飞/中断着陆.................................................................................................................... 52 任务 O. 断电 180° 精度进近和着陆(ASEL、ASES)......................................................................... 53
军用飞机飞行安全的技术方面 - Redalyc
简介/目的:使用现代军用飞机需要投入大量的人力和物力来确保执行特定任务的条件。复杂的技术、不同的飞机使用空间和时间条件要求创造组织和技术条件来协助飞行员飞行,以安全、完整地完成飞行任务。本文的目的是通过描述技术因素对飞行安全的影响来识别飞行安全系统组织中可能存在的问题,并找到在飞机生命周期内解决问题的最佳解决方案。方法:在主题领域的研究中,首先对管理飞行安全领域的法规进行分析,然后描述技术手段及其对飞行安全的影响。结果:在所进行的分析的基础上,确定了在开发和生产过程中确保飞机可靠性的活动,并提出了通过修改规章、组织和技术以及工艺措施来提高飞行安全性的方向。结论:分析结果证实了通过改进和安装技术系统(设备和设备)来发展和提高军用飞机飞行安全性的可能方向的假设,包括航空

在英国运营退役军用飞机飞行许可证......
1.7 与其他类型的飞机相比,退役军用飞机对适航性、运行管理和飞行员能力的要求更高。这些飞机是在复杂的军用系统的支持下建造和运行的,而民用飞机运营商不太可能获得这些系统。它们的运行和飞行的各个方面都涉及许多因素,需要彻底考虑才能保持安全标准。

LFPT - 蓬图瓦兹科尔梅耶斯昂韦克辛 - dircam
RECAT-EU 规范根据飞机尾流湍流将飞机分为六类,该规范在布尔歇进近管理的空域内有效。在此新分类的基础上,提出了新的 LE BOURGET 方法。根据这一新的分类,在飞机飞行期间,到达和离开时将使用基于距离的最小分离标准。在飞机飞行期间,到达和离开时使用新的基于距离的最小分离标准。飞行计划框的填写和措辞保持不变。在第一次无线电联系中,机组人员指示了飞机尾流湍流类型。

高风险活动计划 - 关岛安德森空军基地
af.mil › 文档 PDF 2022 年 8 月 29 日 — 2022 年 8 月 29 日 主题:针对被分配、部署或临时派遣到安德森空军基地的人员的高风险活动 (HRA) 计划...民用轻型飞机飞行。悬崖跳水。

安全 - Meggitt
工作原理 在飞机飞行过程中,我们的控制器和软件会接收来自飞机各处的火灾、烟雾和过热探测器以及灭火器的多个信号。它们持续监控系统运行状况,在检测到烟雾或火灾时迅速向机组人员发出警报。同样重要的是,系统会精确记录小故障,以便在着陆后快速修复。

虚拟仿真SAFEDI工具的开发与应用...
确定飞行包线极限所需的测试,该极限是风速和风向的函数。舰载飞行操作必须应对海洋环境特有的挑战,例如船舶运动和船舶上层建筑产生的尾流湍流。船舶尾流影响飞机性能和操纵品质特征,进而影响飞行员的工作量。船舶尾流特征因船舶而异,甚至同一艘船的不同相对风角也不同。在模拟环境中评估船舶尾流严重程度的能力使得在设计过程中解决与尾流相关的设计考虑因素,例如船舶几何布局和飞机飞行控制设计。NAVAIR 开发了一种桌面尾流分析工具,用于模拟飞机在受到计算流体力学 (CFD) 创建的精确船舶尾流速度时操纵特性。该工具已应用于多种船舶配置,以评估尾流对旋翼和固定翼飞机的影响。这项工作描述了构成尾流评估工具的实时飞机飞行动力学模型和 CFD 尾流模型,总结了验证和确认工作,并描述了用于评估船舶尾流严重程度的比较过程(针对示例船舶配置)。
RS-25 推进系统
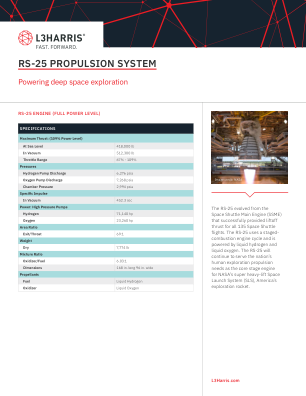
RS-25 是从航天飞机主发动机 (SSME) 演变而来的,后者成功为所有 135 次航天飞机飞行提供了升空推力。RS-25 采用分级燃烧发动机循环,由液氢和液氧提供动力。RS-25 将继续作为美国宇航局超重型太空发射系统 (SLS)(美国探索火箭)的核心级发动机,满足美国载人探索推进的需求。