XiaoMi-AI文件搜索系统
World File Search System飞行模式
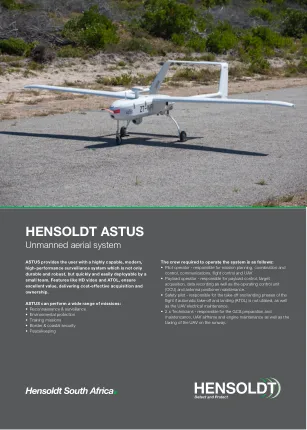
MASS™ 军用机载监视系统
MASS 包括标准 TCAS 操作模式以及可选择的协同飞行模式,以支持协同飞行情况下的操作,例如编队或会合操作。未选择协同飞行模式时,系统通常作为 TCAS/ACAS II 防撞系统运行。带 MASS 的 T 3 CAS 通常与模式 S/IFF 转发器和内部转发器一起使用。T 3 CAS 已通过与多个行业模型的互操作性测试。

探索用于学术领域的低成本自动驾驶仪系统
参考文献................................................................................................................................................................ 74 附录................................................................................................................................................................ 77 核心 APM 自动驾驶仪固件飞行模式列表................................................................................................ 78
附加仪表飞行机动
仪表起飞(ITO)....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................1 图案 A.................... ... . . . . . . . . . . . . 4 图案 B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................ 8 基本仪表飞行模式............................................................................................................................................................................................................................................................................................................................. ........................................................................................................................................................................................ ........................................................................................................................................................................................ 11 VOR 时间/距离检查....................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................ . ...

肉牛对无人机 (UAV) 干扰的反应
农业。然而,关于无人机干扰对动物福祉影响的研究缺乏或有限。本研究的目的是通过测量单次或多次无人机飞行时牛的心率和运动率来研究无人机飞行对肉牛的影响。总共 16-18 头杂交肉牛小母牛被引入不同的飞行模式,飞行高度在 5 到 9 米之间,水平速度约为 1 到 2 米/秒,持续 4 周,每周重复飞行 3 天。研究结果表明,单次无人机飞行(i)圆形和(ii)网格模式飞行对小母牛的心率和运动率没有显着影响。然而,多次(i)圆形模式和(ii)接近式飞行在首次引入无人机时会增加小母牛的心率,但重复飞行会导致习惯。此外,刚开始接触圆形飞行模式的小母牛可能会逃跑,但经过多次飞行后就会习惯。然而,接触接近式飞行模式的小母牛即使经过多次飞行,也表现出更多的逃跑行为。本研究的结果将为安全使用无人机进行牛健康和行为监测提供信息。关键词:无人机、网格模式、圆形模式、心率、

四旋翼可转换 MAV:建模和实时悬停飞行控制
摘要 本文介绍了一种实验性倾转旋翼飞机的建模、控制和硬件实现。这种飞行器通过倾斜四个旋翼,将传统飞机的高速巡航能力与直升机的悬停能力结合起来。空中在巡航和悬停飞行模式之间切换称为过渡。使用牛顿方法推导出该飞行器的垂直和水平飞行模式的动态模型。提出并在模拟层面评估了一种非线性控制策略,以控制飞行器在纵向平面上的垂直和水平飞行动力学。开发了一架实验性的四平面飞机来进行垂直飞行。设计并构建了一种基于 DSP 的低成本嵌入式飞行控制系统 (EFCS),以实现自主姿态稳定飞行。



在倾转旋翼试验台上对贝尔 699 转子进行声学评估
40 : a) 直升机模式 ( μ = 0.125, C T /σ = 0.075, α s = 0°, M AT = 0.770), b) 过渡模式 ( μ = 0.125, C T /σ = 0.0493,α s = -45°,MAT = 0.767),以及 c) 飞行模式 ( μ = 0.0328,C T /σ = 0.0549,α s = - 90°,MAT = 0.770)。................................................ . ……………………………… ...................... 49

倾转旋翼机接近飞机的路径规划模型...
摘要 建立了倾转旋翼机接近航空母舰的路径规划模型,模型中考虑了倾转旋翼机的特点、着舰任务和航母所处环境。首先,给出了倾转旋翼机在各飞行模式下的运动方程和机动性能,给出了控制变量和飞行包线的约束条件。将倾转旋翼机返航分为3个阶段,对应倾转旋翼机的3种飞行模式,并设定了各阶段的约束条件和目标。考虑到倾转旋翼机的飞行安全性,将航母所处环境描述为可飞空间和禁飞区,并考虑运动航母所引起的湍流和风场的影响设定了禁飞区。将路径规划问题转化为在控制变量和状态变量约束下的优化问题。根据所建模型的特点,结合“逐步”和“一次性”路径搜索策略,设计了一种基于鸽派优化(PIO)的路径规划算法。仿真结果表明,倾转旋翼机能够以合理的着陆路径到达目标点。并通过对不同算法的比较,验证了PIO算法能够解决该在线路径规划问题。