XiaoMi-AI文件搜索系统
World File Search System骑车人

旨在实现一个人们可以自由、安心地移动的社会“Ayatorihi”
“智能驾驶辅助技术”的一个例子,它不仅在接近人行横道时通知驾驶员,而且还提醒驾驶员注意身后试图穿过人行横道的骑车人。人工智能将了解驾驶员对外界知道什么和不知道什么,并通过仪表板上的风险指示器和安全带张力的持续变化来传达这些信息。
最近加利福尼亚最高法院的观点强调,设计豁免权可能但并非总是适用于未能警告危险条件案件
Tansavatdi涉及致命的骑自行车的人与卡车碰撞。所谓的危险条件是在陡峭的半英里长的道路部分上没有自行车道,并且未能警告自行车道在该部分中暂时停下来。在那里,骑自行车的人沿着该区域的道路骑行,在道路经过社区公园时没有自行车道。当骑自行车的人在非自行车车道截面末端接近交叉路口时,他只在右转弯的车道上行驶,但穿过交叉路口,并与一辆卡车在他面前转动(卡车司机相信骑车人都会右转,因为他在右上只有车道)。纽约市提出的大量证据表明,道路设计,包括没有自行车道来为社区公园提供停车位,已由许可的Traine -lick工程师准备并得到该市批准。
基于 Simulink 的电动自行车动力学和再生制动仿真,用于电池充电状态评估
如 [16]-[18] 所示,仅当车速不太低且制动持续一段时间时,再生制动才会导致显著的能量存储。因此,控制策略应该能够根据实际驾驶条件有效评估是否执行再生制动或依靠机械制动。在牵引阶段也会出现同样的决策问题。确定电动机应提供多少机械扭矩来协助骑车人踩踏属于能量管理系统 (EMS) 的决策范围。已经提出了多项研究,其目标是优化用户的骑行质量并最大限度地提高电池中储存的能量 [13]。最后,如表一所示,许多研究都集中在优化能量存储上。这些研究的目标是为特定应用选择最合适的电池技术,并优化其数量以确保足够的续航里程来完成给定的驾驶任务 [14]-[15]。
多伦多自行车行业名录
1. 当地自行车/电动自行车/轻型电动车制造商 对于想要购买当地产品的个人,这里提供了一份多伦多地区制造自行车或定制自行车的公司列表。他们要么直接销售,要么通过当地自行车零售店销售。这份名单将包括传统自行车以及电动自行车、踏板车和轻型电动车。电动自行车是配备电动马达的自行车,可在骑车人踩踏板时提供助力。该马达由可充电电池供电,可拆卸充电,或在靠近插座的自行车上充电。与传统自行车相比,这种选择的一个好处是能够以较少的力气骑得更快、更远。轻型电动车 (LEV) 是小型 3 轮或 4 轮汽车,设计用于在城市街道上低速行驶。自行车、电动自行车、踏板车和 LEV 都可以作为短途旅行中燃气汽车的环保可持续且经济高效的替代品。

研究声明 - GitHub 页面
我的研究生工作重点是了解人类在自行车上保持平衡时使用的控制机制。由于自行车是一种动态复杂的车辆[1,15,36,18],充当人类与环境之间的中介,因此它是了解平衡和手动控制的理想车辆平台。我早期的研究生工作重点是将主成分分析应用于跑步机上稳定骑行期间的大量运动捕捉数据,从而确定了主要运动模式并揭示了低速时用于保持平衡的细微腿部运动[17,35]。我们通过对城市周围和跑步机上更自然的骑行行为进行视频分析,进一步证实了这种低速行为[13]。此后,这项工作在运动研究文献中被广泛引用。在那些初步实验之后,我设计并制作了一辆装有独特仪器的自行车,能够准确测量骑车人-车辆系统的完整动态状态[21,32],包括最
研究声明 - GitHub 页面
我的研究生工作重点是了解人类在自行车上保持平衡时使用的控制机制。由于自行车是一种动态复杂的车辆[1,15,36,18],充当人类与环境之间的中介,因此它是了解平衡和手动控制的理想车辆平台。我早期的研究生工作重点是将主成分分析应用于跑步机上稳定骑行期间的大量运动捕捉数据,从而确定了主要运动模式并揭示了低速时用于保持平衡的细微腿部运动[17,35]。我们通过对城市周围和跑步机上更自然的骑行行为进行视频分析,进一步证实了这种低速行为[13]。此后,这项工作在运动研究文献中被广泛引用。在那些初步实验之后,我设计并制作了一辆装有独特仪器的自行车,能够准确测量骑车人-车辆系统的完整动态状态[21,32],包括最
研究声明 - GitHub 页面
我的研究生工作重点是了解人类在自行车上保持平衡时使用的控制机制。由于自行车是一种动态复杂的车辆 [ 1 , 15 , 36 , 18 ],充当人类与环境之间的中介,因此它是了解平衡和手动控制的理想车辆平台。我早期的研究生工作重点是将主成分分析应用于跑步机上稳定骑行期间的大量运动捕捉数据,从而确定了主要运动模式并揭示了低速时用于保持平衡的细微腿部运动 [ 17 , 35 ]。我们通过对城市周围和跑步机上更自然的骑行行为的视频分析进一步证实了这种低速行为 [ 13 ]。此后,这项工作在运动研究文献中被广泛引用。在这些初步实验之后,我设计并制作了一辆装有独特仪器的自行车,能够准确测量骑车人-车辆系统的完整动态状态 [ 21 , 32 ],包括最
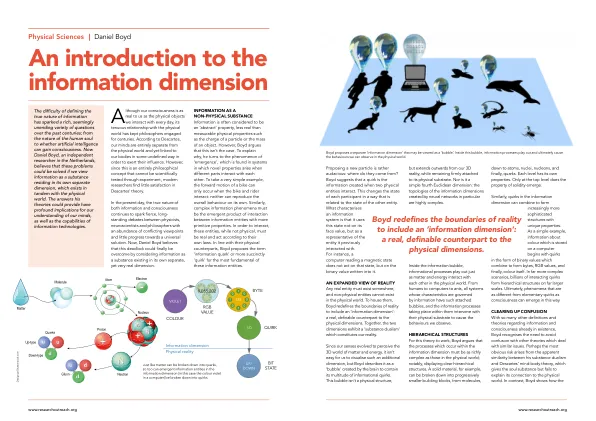
信息维度简介
信息作为一种非物理实体 信息通常被认为是一种“抽象”属性,不如可测量的物理属性(例如粒子的电荷或物体的质量)真实。然而,博伊德认为事实并非如此。为了解释原因,他转向“涌现”现象,这种现象存在于系统中,当不同部分相互作用时,会产生新属性。举一个非常简单的例子,自行车的向前运动只有在自行车和骑车人相互作用时才会发生:两者都无法单独重现整体行为。同样,复杂的信息现象必须是具有更原始属性的信息实体之间相互作用的涌现产物。为了进行交互,这些实体虽然不是物理实体,但必须是真实的并按照自己的规律行事。与物理对应物一致,博伊德提出了“信息夸克”或更简洁的“怪癖”一词来表示这些信息实体中最基本的实体。
研究声明 - GitHub 页面
我的研究生工作重点是了解人类在自行车上保持平衡时使用的控制机制。由于自行车是一种动态复杂的车辆[1,15,36,18],充当人类与环境之间的中介,因此它是了解平衡和手动控制的理想车辆平台。我早期的研究生工作重点是将主成分分析应用于跑步机上稳定骑行期间的大量运动捕捉数据,从而确定了主要运动模式并揭示了低速时用于保持平衡的细微腿部运动[17,35]。我们通过对城市周围和跑步机上更自然的骑行行为进行视频分析,进一步证实了这种低速行为[13]。此后,这项工作在运动研究文献中被广泛引用。在那些初步实验之后,我设计并制作了一辆装有独特仪器的自行车,能够准确测量骑车人-车辆系统的完整动态状态[21,32],包括最
研究声明 - GitHub 页面
我的研究生工作重点是了解人类在自行车上保持平衡时使用的控制机制。由于自行车是一种动态复杂的车辆 [ 1 , 15 , 36 , 18 ],充当人类与环境之间的中介,因此它是了解平衡和手动控制的理想车辆平台。我早期的研究生工作重点是将主成分分析应用于跑步机上稳定骑行期间的大量运动捕捉数据,该方法确定了主要运动模式并揭示了低速时用于保持平衡的细微腿部运动 [ 17 , 35 ]。我们通过对城市周围和跑步机上更自然的骑行行为进行视频分析,进一步证实了这种低速行为 [ 13 ]。此后,这项工作在运动研究文献中被广泛引用。在那些初步实验之后,我设计并制作了一辆装有独特仪器的自行车,能够准确测量骑车人-车辆系统的完整动态 [ 21 , 32 ],包括最