机构名称:
¥ 1.0
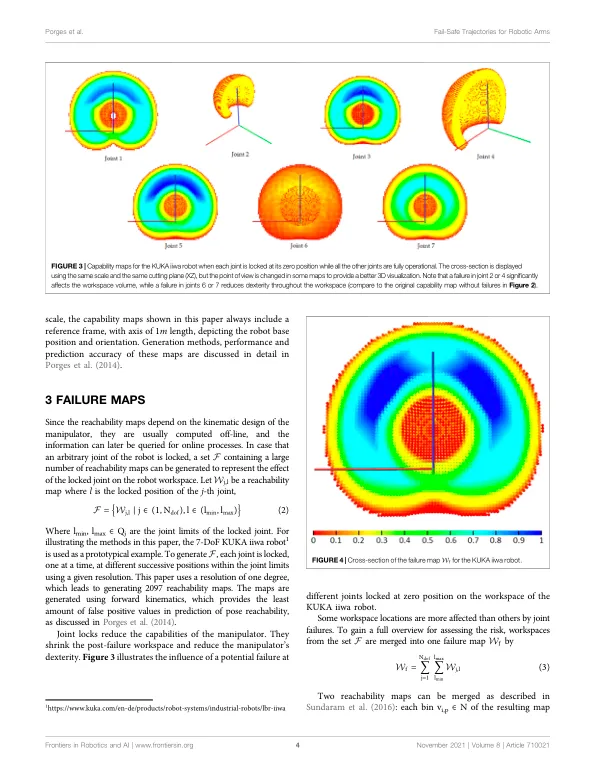
对于部署在对人类有害和危险环境中的机器人操纵器,经常会担心关节故障时任务执行的可靠性。冗余机器人操纵器可用于降低风险并确保故障后任务的完成,这对于太空应用等至关重要。本文介绍了分析关节故障潜在风险的方法,并介绍了用于机器人操纵器的容错任务设计和路径规划的工具。所提出的方法基于离线预计算工作空间模型。这些方法足够通用,可以处理具有任何类型的关节(旋转或棱柱)和任意数量的自由度的机器人,并且可能在过程中包括任意形状的障碍物,而无需借助简化模型。应用示例说明了该方法的潜力。
规划空间机械臂的故障安全轨迹
主要关键词



相关文件推荐