机构名称:
¥ 1.0
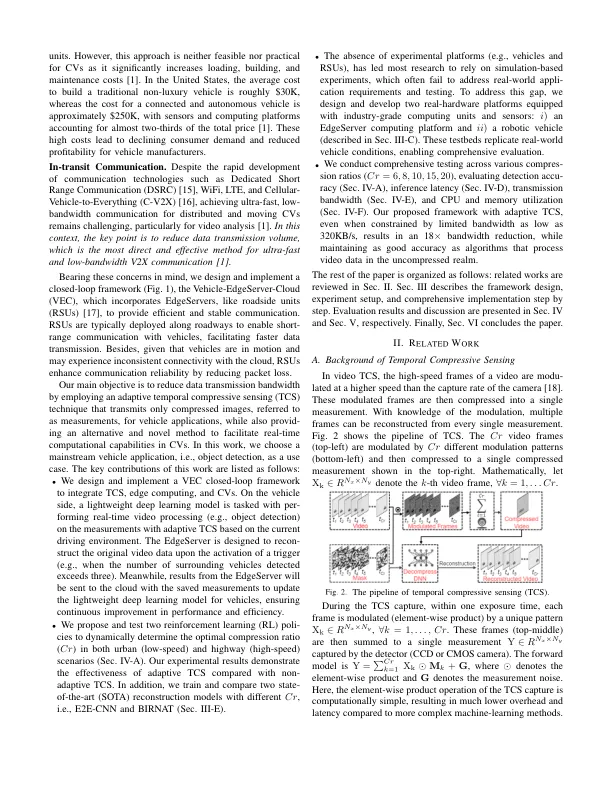
摘要 - 连接的车辆(CVS)在连续的大数据传输方面面临重大挑战,导致较高的传输带宽成本和影响实时决策。为了解决这个问题,我们提出了基于强化学习和时间压缩感知的两种动态驾驶感知机制,以智能压缩视频数据。这些机制适应驾驶条件,减少带宽,同时保留足够的信息以进行准确的应用,例如对象检测并确保在需要时确保高质量的重建。我们还实施了一个集成这些机制的车辆边缘库云(VEC)闭环框架。具体来说,轻巧的车辆模型对压缩数据(测量)进行实时检测,而Edgeserver则在需要时接收测量并重建场景。然后将测量结果,重建视频和分析结果发送到云中以进行车辆模型更新。与传统方法不同,我们的框架无缝地适应了跨车辆,边缘服务器和云,从而支持有效的数据传输和动态模型更新。在我们设计的路边单元平台和机器人车辆上进行了广泛的评估,这些车辆配备了行业级传感器和计算单元。结果表明,与非自适应测量值相比,在320kb/s的带宽下降低了18倍,同时保持高检测精度和重建质量,突出了该框架对CVS的有希望的现实世界应用。
连接车辆的有效数据传输框架
主要关键词




相关文件推荐