
机构名称:
¥ 1.0
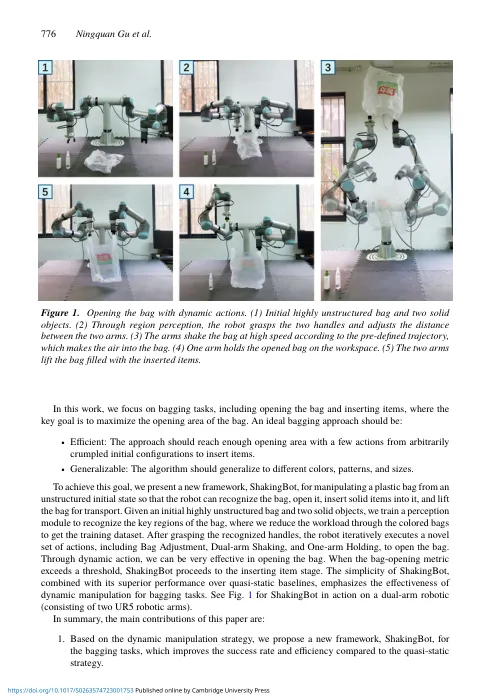
通过机器人的抽象袋操纵是由于袋子的可变形性而变得复杂而挑战。基于动态操纵策略,我们为行李任务提出了一个新框架,Shakingbot。Shakingbot Utiz liz liz liz liz the感知模块,从任意初始配置中识别塑料袋的关键区域。根据细分,摇晃迭代地执行了一套新颖的动作,包括调整袋,双臂摇动和一臂固定,以打开袋子。动态动作,双臂摇动,可以有效地打开袋子,而无需考虑弄皱的配置。然后,机器人插入物品并抬起袋子进行运输。我们在双臂机器人上执行我们的方法,并获得21/33的成功率,以在各种初始袋子配置中插入至少一个项目。在这项工作中,我们证明了与包装任务中的准静态操纵相比,动态摇动动作的性能。我们还表明,尽管袋子的尺寸,图案和颜色,我们的方法仍会概括为变化。补充材料可从https://github.com/zhangxiaozhier/shakingbot获得。
Shakingbot:装袋的动态操作
主要关键词

相关文件推荐

