机构名称:
¥ 1.0
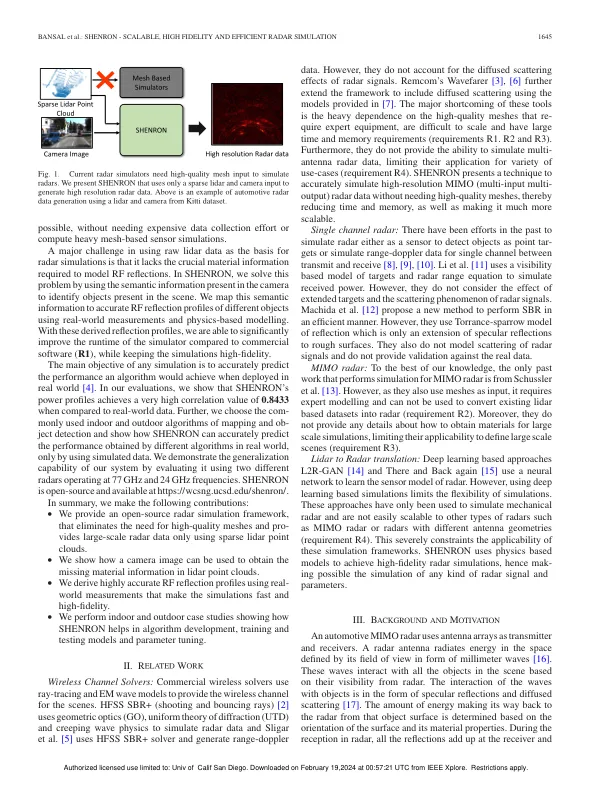
摘要 - 由于缺乏可用的高分辨率雷达数据集,并且在获取现实世界中的数据方面缺乏可用的高分辨率雷达数据集和巨大的困难,因此摘要模拟已成为雷达算法开发和测试的重要工具。但是,由于现有的雷达仿真工具不容易易于访问,需要详细的网格输入并花费小时才能模拟,模拟雷达数据很具有挑战性。 为了解决这些问题,我们提出了Shenron,这是一个开源框架,它有效地仅使用LIDAR点云和相机图像来模拟高档MIMO雷达数据。 我们表明,使用Shenron,可以生成模拟数据,这些数据可用于与实际数据一样有效地评估算法。 此外,人们可以通过雷达的庞大参数空间进行快速迭代,以找到任何应用程序的最佳参数集,并在雷达感知和传感器融合方面具有很大的帮助研究。模拟雷达数据很具有挑战性。为了解决这些问题,我们提出了Shenron,这是一个开源框架,它有效地仅使用LIDAR点云和相机图像来模拟高档MIMO雷达数据。我们表明,使用Shenron,可以生成模拟数据,这些数据可用于与实际数据一样有效地评估算法。此外,人们可以通过雷达的庞大参数空间进行快速迭代,以找到任何应用程序的最佳参数集,并在雷达感知和传感器融合方面具有很大的帮助研究。
可扩展,高保真和有效的雷达模拟
主要关键词




相关文件推荐