机构名称:
¥ 1.0
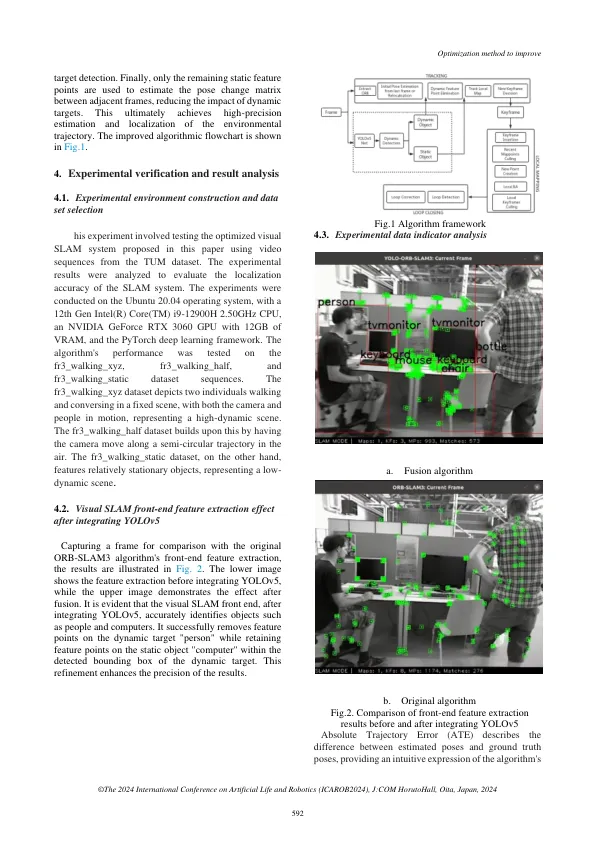
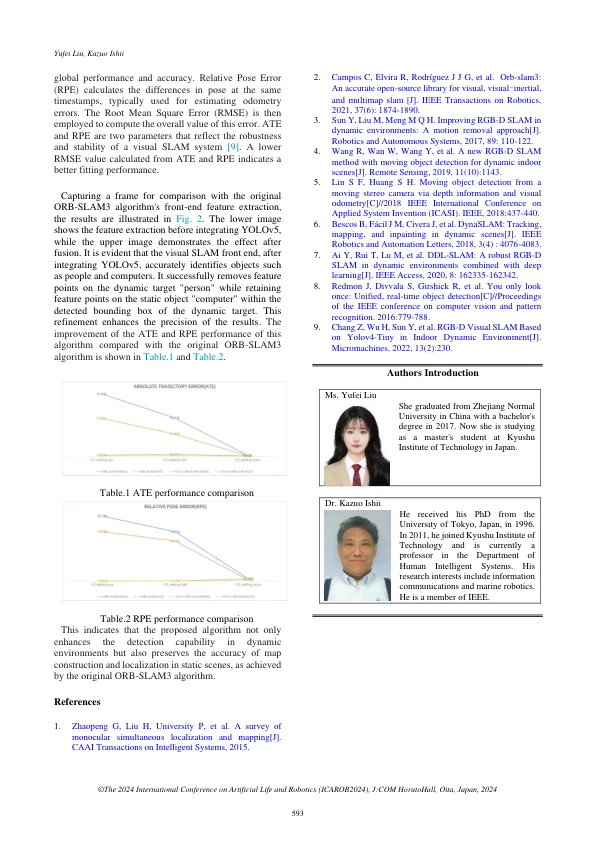
是针对一个问题,即经典视觉大满贯系统的鲁棒性受到环境中动态目标特征点的极大影响,提出了一种使用目标检测算法来识别和消除动态目标特征点的方法。首先,使用目标检测算法yolov5识别收集的环境图像,然后选择周围环境。对象被识别为环境中的动态目标,然后将目标检测结果集成到视觉猛击前端的特征提取中,删除了提取图像特征点的动态目标部分的特征点,其余的静态特征点用于映射构造和定位,并在TUM DATA集合上进行测试。结果表明,在使用目标检测算法来消除动态特征点后,在高度动态的场景中,视觉SLAM系统的绝对轨迹误差的根平方误差将减少97.89%,从而有效提高了系统的定位准确性和鲁棒性。
优化方法在动态环境中改善视觉猛击
主要关键词


相关文件推荐