机构名称:
¥ 1.0
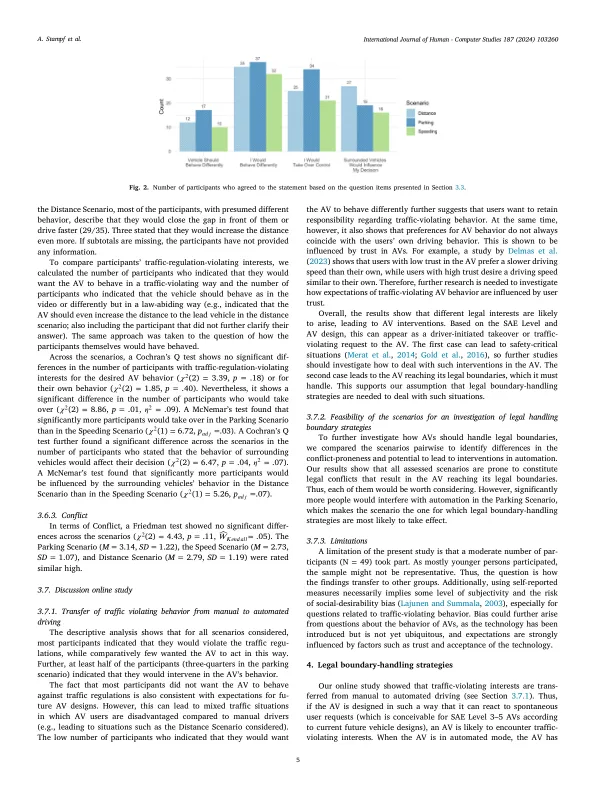
对交通法规的轻微违规行为很普遍,部分被社会接受。自动化车辆(AV)将有义务遵守法律信。这可能导致用户要求导致AV达到其法律界限,从而造成新颖的用户车辆冲突。为了调查流量竞争驾驶员的兴趣是否转移到自动上下文中,我们进行了一项在线调查,其中有三种容易冲突的情况(n = 49)。结果表明需要合法符合合法的AV行为,但用户将干预车辆的行为以实施利益。在随后的虚拟现实研究(n = 30)中,我们评估了法律边界处理策略(责任和控制转移,责任转移,无转移)和其他交通参与者对行为,冲突和信任的交通法规的影响,对具有法律冲突的停车场景。结果表明,与手动基线相比,所有策略中的冲突都明显更高,而车辆的情境信任在自动条件下较高,但独立于处理策略。
法律和命令
主要关键词




相关文件推荐