机构名称:
¥ 1.0
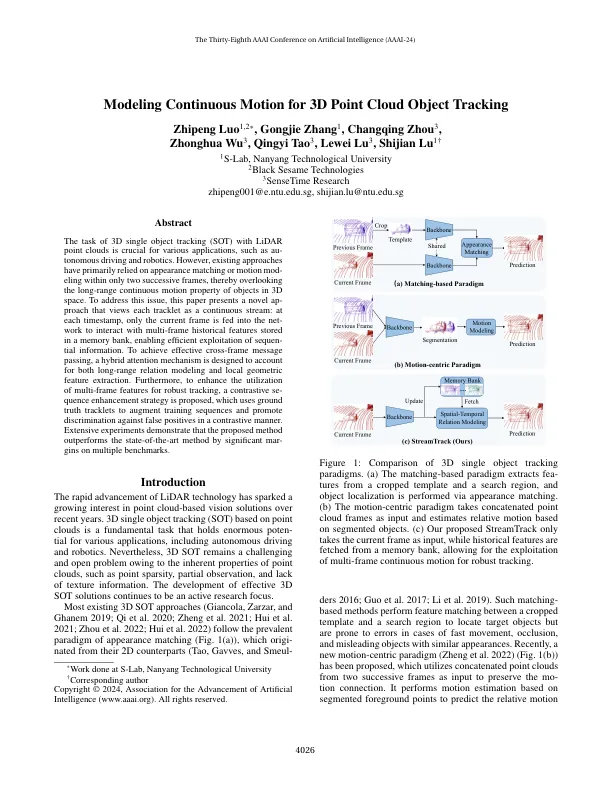
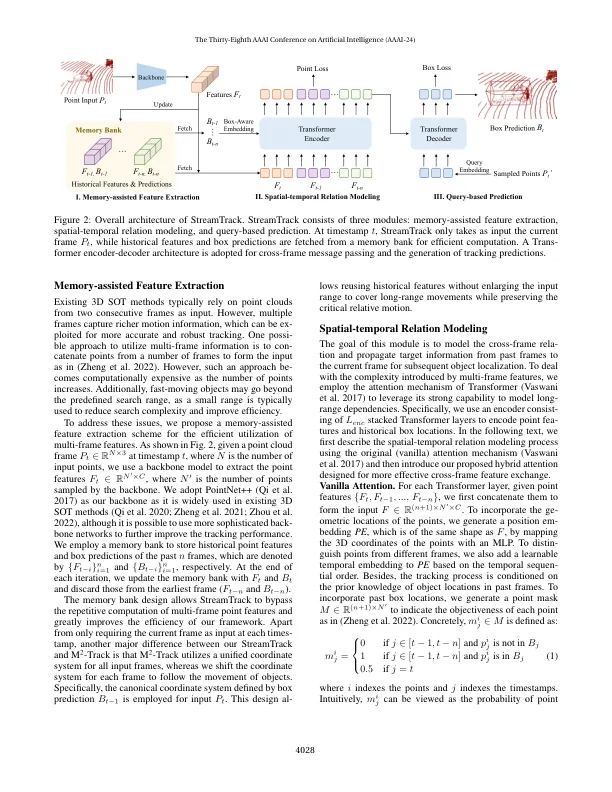
带有LIDAR点云的3D单一对象跟踪(SOT)的任务对于各种应用程序(例如Au au sosos驱动器和机器人)至关重要。但是,现有方法主要依赖于外观匹配或仅在两个连续的框架内进行匹配或运动模拟,从而俯瞰3D空间中对象的远程连续运动属性。为了解决这个问题,本文提出了一个新颖的信息,将每个曲目视为连续的流:在每个时间戳上,只有当前框架被馈入网络工作,以与存储在存储库中的多帧历史特征进行交互,从而有效利用了序列信息的有效利用。为了实现有效的跨帧消息传递,混合注意机制旨在说明远程关系建模和局部几何特征提取。此外,为了增强多帧特征的利用来进行健壮的跟踪,提出了一种对比性的增强策略,该策略使用地面真相轨迹来增强训练序列并促进对比方式的歧视误差。广泛的实验表明,所提出的方法在多个基准上通过重要的婚姻优于最先进的方法。
建模3D点云对象跟踪的连续运动
主要关键词



相关文件推荐