XiaoMi-AI文件搜索系统
World File Search System上肢
上肢障碍者的一种新的身份验证方法
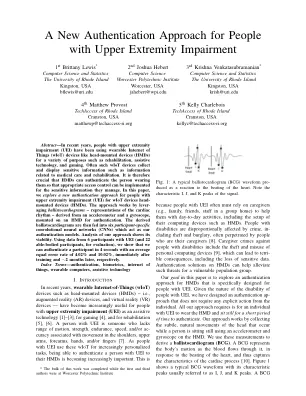
摘要 - 近年来,上肢障碍的人(UEI)一直使用可穿戴的物联网(Wiot)设备,例如头部安装的设备(HMD),例如康复,辅助技术和游戏等各种目的。这种Wiot设备经常收集和显示敏感信息,例如与医疗和康复有关的信息。因此,HMD可以验证戴着它们的人,以便可以为他们管理的敏感信息实施适当的访问控制。在本文中,我们为Wiot设备的上肢设备(HMDS)探索了一种新的身份验证方法(UEI)。该方法通过杠杆式ballistarcardiogonmon(心律的表示)来起作用,该方法源自加速度计和陀螺仪,安装在HMD上以进行身份验证。然后将派生的ballistaragartiongrogongon送入六个参与者特定的卷积神经网络(CNN),这些神经网络(CNN)充当我们的身份验证模型。对我们方法的分析显示其可行性。使用来自UEI的6位参与者的数据(和22名健全的参与者,进行评估),我们表明我们可以在4秒内验证参与者,平均误差率分别为4.02%和10.02%,分别在培训后和2个月后立即对参与者进行身份验证。索引术语 - 授权,生物识别技术,物联网,可穿戴计算机,辅助技术

Promotoer 是一种脑机接口辅助干预措施,用于促进中风后上肢功能性运动恢复:一项随机对照试验的研究方案,用于测试早期和长期疗效并确定反应的决定因素
背景:中风是导致长期残疾的主要原因。我们急需具有成本效益的中风后上肢康复计划。能够调节脑电图 (EEG) 感觉运动节律的脑机接口 (BCI) 是促进中风后上肢运动功能恢复的有前途的工具。“ Promotoer ”研究旨在促进基于 EEG 的 BCI 在临床实践中的应用,为其在增强中风后手部功能运动恢复方面的短期/长期疗效提供证据,并提供参与者对基于 BCI 的干预的反应的可量化指标。为了实现这些目标,我们将进行一项纵向研究,其中亚急性中风参与者将接受由 Promotoer 系统辅助的手部运动意象 (MI) 训练,Promotoer 系统是一种完全符合康复要求的基于 EEG 的 BCI 系统。

渐进关系网络:基于少量脑电图学习解码直觉上肢运动想象
摘要 —脑机接口 (BCI) 是一种连接用户和外部设备的通信工具。在实时 BCI 环境中,每个用户和每个会话都需要进行校准过程。此过程消耗大量时间,阻碍了 BCI 系统在真实场景中的应用。为了避免这个问题,我们采用基于度量的少样本学习方法,使用可以逐步考虑时间和光谱组组合的渐进关系网络 (GRN) 来解码直觉上肢运动想象 (MI)。我们从 25 名受试者那里获取了与直觉上肢运动相关的上臂、前臂和手的 MI 数据。在 1 次、5 次和 25 次设置下,离线分析下的总平均多类分类结果分别为 42.57%、55.60% 和 80.85%。此外,我们可以使用少样本方法在实时机械臂控制场景中展示直观 MI 解码的可行性。五名参与者在饮水任务中可实现 78% 的成功率。因此,我们展示了通过关注人体部位缩短校准时间的在线机械臂控制的可行性,同时也展示了基于所提出的 GRN 适应各种未经训练的直观 MI 解码。

亚急性卒中上肢功能障碍患者接受BCI训练等综合康复治疗后脑功能网络研究
基于脑机接口 (BCI) 的训练有望用于治疗上肢瘫痪的中风患者。然而,大多数中风患者接受的综合治疗不仅包括 BCI,还包括常规训练。本研究的目的是研究在中风亚急性期接受包括 BCI 训练在内的综合治疗后大脑功能网络的拓扑变化。25 名住院的中度至重度 UL 瘫痪亚急性中风患者被分配到两组中的一组:4 周综合治疗,包括常规和 BCI 训练(BCI 组,BG,n = 14)和 4 周常规训练(无 BCI 支持)(对照组,CG,n = 11)。在训练前后进行功能性 UL 评估,包括 Fugl-Meyer 评估-UL (FMA-UL)、动作研究手臂测试 (ARAT) 和 Wolf 运动功能测试 (WMFT)。通过静息态功能磁共振成像对 BG 中的功能连接 (FC) 进行神经影像学评估。训练后,与基线相比,两组的所有临床评估(FMA-UL、ARAT 和 WMFT)均显著改善(p < 0.05)。同时,BG 的 FMA-UL(p < 0.05)、ARAT(p < 0.05)和 WMFT(p < 0.05)功能改善更明显。同时,BG 的 FC 在整个大脑范围内增加,包括颞叶、顶叶、枕叶和皮层下区域。更重要的是,训练后,体感联合皮层和壳核之间的半球间 FC 增加与 UL 运动功能呈强正相关。我们的研究结果表明,包括 BCI 训练在内的综合康复比常规训练更能增强亚急性卒中患者的 UL 运动功能。亚急性卒中患者脑功能网络拓扑的重组可以增强

从预解码上肢复杂运动...
近年来,脑机接口 (BCI) 已被提议作为中风后神经康复的一种手段 [1, 2]。研究表明,BCI 可以人工关闭因病变而中断的运动控制回路。BCI 可以通过脑电图解码尝试运动,并触发外骨骼或电刺激等设备,这些设备可以响应尝试运动提供相关的躯体感觉反馈 [3-6]。通过将与尝试运动和躯体感觉反馈相关的皮质活动配对,推测可以诱导与赫布相关的可塑性 [7]。多项研究概述了使用 BCI 进行中风康复的临床效果,其中普遍趋势是患者可以诱导可塑性并改善运动功能 [8-11]。为了进一步完善 BCI 在运动障碍康复中的应用,下一步可能是解码比简单的孤立运动更复杂、更具临床相关性的功能性运动,尽管它们也很重要。使用更加复杂的现代外骨骼,这些复杂的运动也更容易实现。然而,限制因素可能是从单次脑电图中解码功能性运动,因为记录的电活动是潜在活动的模糊图像,例如由于体积传导 [12]。先前的研究表明,可以解码具有不同动力学特征的不同运动类型 [4, 6, 13, 14],但这主要是简单的孤立运动,例如踝关节背屈或腕关节伸展/屈曲。此外,同一肢体的不同运动类型也已被解码 [15, 16]。研究还表明,可以从脑电图中检测到更复杂的运动,例如 [17],但要用于诱导可塑性的康复,仅应使用运动前活动来实现传出活动和体感反馈之间的严格时间关联 [18]。预计体感反馈应在最大传出活动 [7] 后不到 200-300 毫秒内到达皮质层,此时运动控制信号被发送到脊髓。这限制了可用于解码预期运动的判别信息量。尽管 EEG 的空间分辨率有限,但硬件(放大器和电极)和信号处理技术不断改进,可能可以从单次试验 EEG 中解码复杂的功能性运动。

任务导向训练联合振动疗法对脑卒中偏瘫患者上肢功能的影响
摘要:目的:研究任务导向训练联合振动疗法对脑卒中偏瘫患者上肢功能的影响。方法:将108例脑卒中偏瘫患者随机分为对照组(常规上肢训练,36例)、观察组1(常规上肢训练加振动疗法,36例)和观察组2(常规上肢训练加振动疗法加任务导向训练,36例)。剔除退出研究的患者,共95例,其中对照组30例,观察组132例,观察组233例。治疗后对所有患者进行Fugl-Meyer功能评估量表(FMA)、Wolf运动功能测试(WMFT)、改良Ashworth痉挛评定量表(MAS)评分及最大握力评估,并进行比较。结果:治疗前3组FMA评分比较差异均无统计学意义(P>0.05)。对照组治疗前后FMA、WMFT、MAS评分及最大握力均无差异(均P>0.05),观察1、2组治疗前后FMA、MAS评分及最大握力比较差异均有统计学意义(均P<0.05)。治疗后,观察1组FMA评分及最大握力高于对照组,MAS评分低于对照组,差异均有统计学意义(均P<0.05)。观察2组FMA、WMFT评分及最大握力高于对照组和观察1组,MAS评分低于其余各组,差异均有统计学意义(均P<0.05)。结论:任务导向训练联合振动疗法对脑卒中偏瘫患者上肢功能障碍康复有显著效果,值得临床推广应用。

基于对象分类的上肢假肢用户-假肢界面
摘要 — 用户-假肢接口 (UPI) 的复杂性,用于控制和选择主动上肢假肢的不同抓握模式和手势,以及使用肌电图 (EMG) 所带来的问题,以及长时间的训练和适应,都会影响截肢者停止使用该设备。此外,开发成本和具有挑战性的研究使得最终产品对于绝大多数桡骨截肢者来说过于昂贵,并且经常为截肢者提供无法满足其需求的界面。通常,EMG 控制的多抓握假肢将一组肌肉的特定收缩的具有挑战性的检测映射到一种抓握类型,将可能的抓握次数限制为可区分的肌肉收缩次数。为了降低成本并以定制方式促进用户和系统之间的交互,我们提出了一种基于图像和 EMG 对象分类的混合 UPI,与 3D 打印上肢假肢集成,由 Android 开发的智能手机应用程序控制。这种方法可以轻松更新系统,并降低用户所需的认知努力,从而满足功能性和低成本之间的权衡。因此,用户可以通过拍摄要交互的物体的照片来实现无数预定义的抓握类型、手势和动作序列,只需使用四种肌肉收缩来验证和启动建议的交互类型。实验结果表明,假肢在与日常生活物体交互时具有出色的机械性能,控制器和分类器具有很高的准确性和响应能力。

通过 IMU 和 Flex 传感器进行实时上肢跟踪
在本报告中,我们通过执行运动学约束模型表明,单个 IMU 加上一个挠曲传感器就足以获得精确的重建。挠曲传感器是一种 1D 传感器,可根据挠曲程度改变阻力。我们使用现成的设备构建了一个可穿戴的扑克大小的传感器原型。为了证明我们设计的有效性,我们创建了一个虚拟环境,其中玩家被僵尸包围。为了杀死僵尸,玩家必须做出不同的上肢手势来发射能量球。通过设计一组手势,我们彻底评估了我们传感器的灵敏度和稳健性。通过我们的工作,我们希望激发后续研究,研究如何利用人体的内在约束来简化传感器设计。