机构名称:
¥ 1.0
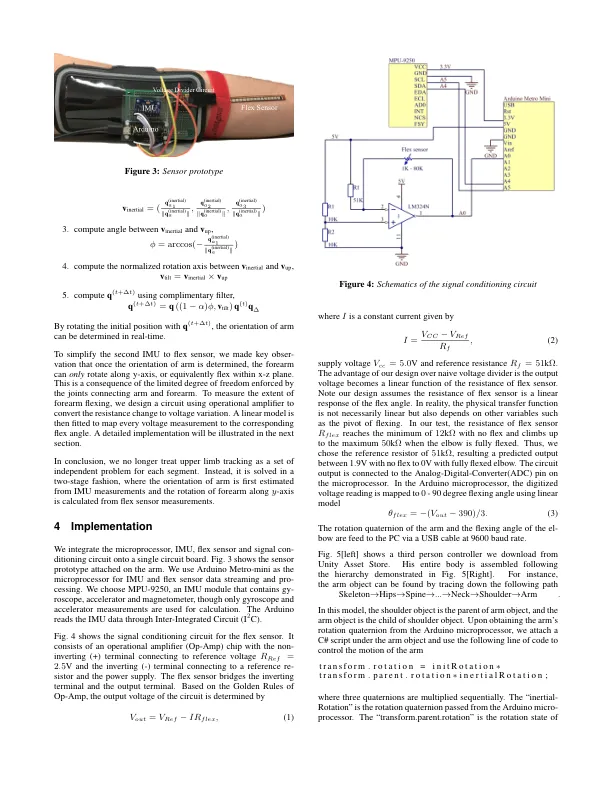
在本报告中,我们通过执行运动学约束模型表明,单个 IMU 加上一个挠曲传感器就足以获得精确的重建。挠曲传感器是一种 1D 传感器,可根据挠曲程度改变阻力。我们使用现成的设备构建了一个可穿戴的扑克大小的传感器原型。为了证明我们设计的有效性,我们创建了一个虚拟环境,其中玩家被僵尸包围。为了杀死僵尸,玩家必须做出不同的上肢手势来发射能量球。通过设计一组手势,我们彻底评估了我们传感器的灵敏度和稳健性。通过我们的工作,我们希望激发后续研究,研究如何利用人体的内在约束来简化传感器设计。
通过 IMU 和 Flex 传感器进行实时上肢跟踪
主要关键词




相关文件推荐