XiaoMi-AI文件搜索系统
World File Search System任务空间

用于飞机制造的人形机器人——Irisa
摘要 — 我们报告了一项合作项目的结果,该项目研究了在飞机制造中部署人形机器人解决方案,用于轮式或轨道式机器人平台无法进入的一些装配操作。多接触规划和控制、双足行走、嵌入式 SLAM、全身多感官任务空间优化控制以及接触检测和安全方面的最新发展表明,考虑到这种大规模制造现场的特定要求,人形机器人可能是自动化的可行解决方案。主要挑战是将这些科学和技术进步集成到两个现有的人形平台中:位置控制的 HRP-4 和扭矩控制的 TORO。在空客圣纳泽尔工厂的 1:1 比例的 A350 机身前部模型内的支架组装操作中展示了这种集成工作。我们介绍并讨论了该项目取得的主要成果,并为未来的工作提供了建议。
urbanisation_dec2015.pdf - 联合作战中心 - 北约
在制定全面的作战计划时,必须考虑这一挑战的各个方面。现在和将来,北约在城市环境和沿海地区面临着前所未有的反介入/区域拒止 (A2AD) 挑战。A2AD 侵略不仅威胁到力量投射,也威胁到北约边境地区的集体防御。国家和非国家竞争对手都不断通过网络入侵、多维监视、代理民兵支持以及旨在挑起反西方情绪的心理战对北约的安全构成挑战。混合威胁战术、获得授权的非国家行为者以及先进武器系统的扩散构成了未来的威胁困境,这种困境既难以预测又十分危险。竞争对手将利用战略位置城市的弱点、资源和庇护所,阻止北约进入关键入口,并限制任务空间内的行动自由。他们将劝说或恐吓平民(无论自愿与否)参与全面的 A2AD 战略,该战略采用物理、虚拟和心理成分对军队和脆弱的平民构成危险障碍。5 历史表明,军事行动——
绩效男女言论我的企业...
ICE的任务成功依赖于有效交付和实施其企业服务,包括人力资源(职位管理和招聘),设施管理,资产管理,预算制定和执行,企业风险管理,企业需求发展,信息自由法案合规性以及领导力和领导和职业发展。ICE的企业服务机制是分散的,缺乏整合,并且在角色的分布以及责任,过程和技术的使用方面基本上不可估量。这些服务由整个代理机构的所有计划(无论是总部和ICE的现场办公室)实施,由具有不同技能和能力的人员在各种各样且复杂的任务空间中实施。ICE的任务要求和资源已经增长,但该机构企业服务的增长其使命的功能并没有保持步伐。认识到ICE企业服务的当前状态并不是最佳的,因此ICE启动了企业转型计划(ETI),这是一种多年来的努力,旨在从战略上转变ICE在全球范围内提供企业服务的方式。eti的主要目标是通过诊断出系统性挑战的根本原因,制定和实施策略以持续改进,从而提高ICE企业服务的有效性和效率。

通过收缩理论稳定的模块化控制
我们提出了一种新颖的观点,以将控制理论结果与强化学习(RL)的控制稳定性,鲁棒性和政策转移:为模构架设计部署收缩理论。我们利用收缩理论的模块化来设计坐标转换,该转换可以简化非线性约束,以使稳定性变成可溶解的稳定性,从而在控制网络的输入梯度上产生线性约束。这些约束可以在控制体系结构中实现,因此学习框架保持不变,这是保证控制稳定性的最低侵入性方法。我们还得出相应的理论来表征鲁棒性。为了减轻动态模型的限制和要求,我们提出了一个模块化控制体系结构,包括坐标转换,复合变量和任务空间控制器,可以说很容易与未知环境中的机器人操作进行层次RL集成,并改善其性能。我们在两个模拟的操作场景中演示了我们的结果。这项工作提出了制定建筑设计问题来创建与收缩指标配对的Riemannian空间的潜力。关键字:模块化,收缩理论,增强学习,控制稳定性

机器人系统全身控制的ARC-OPT库
ARC-OPT通过为不同的预定义WBC问题提供配置选项来支持软件开发人员设计此类全身控制器的支持。今天,WBC的方法论已经充分理解,并且存在几个成熟的框架。任务空间反向动力学(TSID)(Prete等,2016)在加速度上实现了腿部机器人的控制算法,而Posa等人的方法。(2016)在扭矩水平上运行。Smits等人。(2009)实施了广义速度-IK框架,但是,它与Orocos项目紧密结合。同样,Pink(Caron等,2024)是一种基于加权的任务框架,用于在Python中实现的差异逆运动学。IHMC全身控制器已为Atlas Robot开发(Feng等,2015),为基于QPS的步行和操纵提供了控制算法。Drake(Tedrake&Drake Development Team,2019年)是用于基于模型的设计和控制复杂机器人的库集。它为几个开源和商业求解器提供了接口,包括线性最小二乘,二次编程和非线性编程。最后,控制!(德克萨斯大学奥斯汀分校,2021年)是围绕Sentis&Khatib(2006)首次引入的全身操作空间控制算法建造的中间件。

民族科学学:迈向对运动文化差异的神经力学理解
每个人的运动是通过感觉运动和社会文化因素之间不断相互作用来雕刻的。一个基于运动控制机制的理论框架表达了社会文化和生物学信号目前如何融合到形状运动的方式。在这里,我们为民族动力学新兴领域提供了一个框架,旨在提供概念空间和词汇量,以帮助在此交叉路口将研究人员聚集在一起。我们提供了一种第一级模式,用于产生和测试关于跨文化运动变化的丰富观察以及神经生理学和运动的生物力学说明之间桥梁差距的文化差异的假设。我们明确解离了确定文化相关运动的两个相互作用的反馈回路:一个由身体内部神经信号调节的感觉运动任务,另一个是通过在环境中产生生态后果的环境中产生的治疗生态任务。一个关键思想是神经系统中个人特异性和文化影响的运动概念的出现,感觉运动和生态任务空间之间的低维功能映射。电动机的口音来自文化环境中运动概念拓扑的感知差异。我们将框架应用于三个例子:语音,步态和掌握。最后,我们讨论了民族生物学研究如何为个性化的运动技能培训和康复提供信息,并挑战前进。本文是主题问题的一部分,“运动中的思想:人工智能时代的体现认知”。

民族科学学:迈向对运动文化差异的神经力学理解
每个人的运动是通过感觉运动和社会文化因素之间不断相互作用来雕刻的。一个基于运动控制机制的理论框架表达了社会文化和生物学信号目前如何融合到形状运动的方式。在这里,我们为民族动力学新兴领域提供了一个框架,旨在提供概念空间和词汇量,以帮助在此交叉路口将研究人员聚集在一起。我们提供了一种第一级模式,用于产生和测试关于跨文化运动变化的丰富观察以及神经生理学和运动的生物力学说明之间桥梁差距的文化差异的假设。我们明确解离了确定文化相关运动的两个相互作用的反馈回路:一个由身体内部神经信号调节的感觉运动任务,另一个是通过在环境中产生生态后果的环境中产生的治疗生态任务。一个关键思想是神经系统中个人特异性和文化影响的运动概念的出现,感觉运动和生态任务空间之间的低维功能映射。电动机的口音来自文化环境中运动概念拓扑的感知差异。我们将框架应用于三个例子:语音,步态和掌握。最后,我们讨论了民族生物学研究如何为个性化的运动技能培训和康复提供信息,并挑战前进。本文是主题问题的一部分,“运动中的思想:人工智能时代的体现认知”。
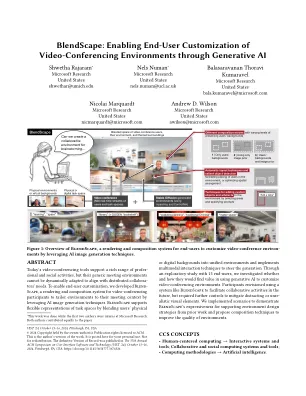
Blendscape:启用视频的最终用户定制 -
在过去几十年中,视频会议技术的进步及其增加的可用性使分布式用户能够协作以前需要面对面互动的活动。自从Covid-19大流行以来,视频会议不仅在促进专业任务(例如远程工作和远程学习[3,39])中获得了知名度,而且还用于健康任命[26],社交聚会[21]和Hobbies和Hobbies [8,62]。但是,由于它们如何撰写会议环境(即,围绕用户的视频呈现的“舞台”或背景),今天的视频会议工具并不能反映其使用的丰富活动范围。用户通常位于通用会议室内的视频网格的单独区域中,这可能导致会议会议[19],减少用户参与度[10],并破坏介导对话的人际线索[28,56]。为了支持与分布式协作者需求一致的更具表现力的视频会议环境,我们设想利用生成AI来使最终用户能够创建自定义的会议环境。为了了解现有的设计空间,我们审查了视频介导的通信研究,该研究重新设计了会议空间,以减轻分布式协作(例如,通信障碍,降低共同存在意识)的挑战。尽管HCI社区对有效的会议环境设计和经验研究的了解证明了它们在分布式协作方面的好处,但对于最终用户无法实时实施这些设计的工具支持。我们确定了三种主要的设计策略:(1)通过环境建立对面的环境(例如,通过渲染共享的任务空间[24,29]或主题视觉效果[20,30]); (2)利用空间隐喻来增强沟通(例如,通过用户之间的邻近相互作用来促进转向的发展[28]); (3)使用环境记录会议历史,以帮助未来的合作[59]。商业自定义工具1需要大量的手动努力,这使得随着会议的进展而无法调整环境[23]。