机构名称:
¥ 1.0
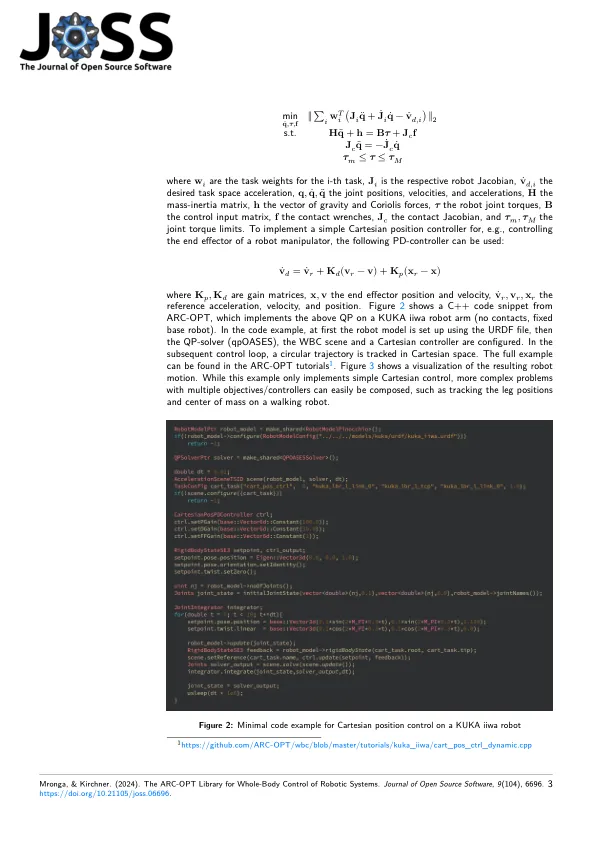
ARC-OPT通过为不同的预定义WBC问题提供配置选项来支持软件开发人员设计此类全身控制器的支持。今天,WBC的方法论已经充分理解,并且存在几个成熟的框架。任务空间反向动力学(TSID)(Prete等,2016)在加速度上实现了腿部机器人的控制算法,而Posa等人的方法。(2016)在扭矩水平上运行。Smits等人。(2009)实施了广义速度-IK框架,但是,它与Orocos项目紧密结合。同样,Pink(Caron等,2024)是一种基于加权的任务框架,用于在Python中实现的差异逆运动学。IHMC全身控制器已为Atlas Robot开发(Feng等,2015),为基于QPS的步行和操纵提供了控制算法。Drake(Tedrake&Drake Development Team,2019年)是用于基于模型的设计和控制复杂机器人的库集。它为几个开源和商业求解器提供了接口,包括线性最小二乘,二次编程和非线性编程。最后,控制!(德克萨斯大学奥斯汀分校,2021年)是围绕Sentis&Khatib(2006)首次引入的全身操作空间控制算法建造的中间件。
机器人系统全身控制的ARC-OPT库
主要关键词


相关文件推荐