XiaoMi-AI文件搜索系统
World File Search System估计


多 IMU 方向估计研究
惯性测量单元 (IMU) 于 20 世纪 30 年代首次应用于飞机导航和大型设备。当时,由于尺寸、成本和功耗等限制,它们的应用受到限制。然而,近年来,微机电 (MEMS) IMU 被引入,具有低成本、紧凑性和低处理能力等非常有利的特性。这些低成本 IMU 传感器的缺点之一是与高端传感器相比精度较低。然而,过去的实验结果表明,冗余 MIMU(磁和惯性测量单元)可提高无人驾驶飞行器的导航性能。尽管过去的模拟和实验结果表明冗余传感器可提高导航性能,但目前的研究工作都没有提供有关需要多少个传感器才能达到一定精度的信息。本文使用模拟环境评估 MIMU 传感器阵列的不同数量的传感器配置。不同旋转的 MIMU 传感器以增量方式添加,并使用 Madgwick 滤波器估计脚踏式 MIMU 数据的欧拉角。使用的评估指标是基于欧拉角与地面实况相比的均方根误差 (RMSE)。在实验过程中,我们注意到随着传感器数量的增加,执行时间呈指数增长,因此,我们设计和实现了代码的并行化,并在多核机器上运行。因此,我们评估了并行实现的加速。使用具有 16 个传感器的并行版本的结果显示,执行时间比仅使用 1 个传感器的执行时间少两倍,比使用顺序版本的执行时间少 24 倍,同时准确率提高了 26%。

从热状态估计哈密顿参数
我们对通过测量已知温度的吉布斯热态来估计未知汉密尔顿参数的最佳精度设定了上限和下限。界限取决于包含参数的汉密尔顿项的不确定性以及该项与完整汉密尔顿量的不交换程度:不确定性越高和交换算子越多,精度越高。我们应用界限来表明存在纠缠热态,使得可以以比 1 = ffiffiffi np 更快的误差来估计参数,从而超过标准量子极限。这个结果支配着汉密尔顿量,其中未知标量参数(例如磁场分量)与 n 个量子比特传感器局部相同耦合。在高温范围内,我们的界限允许精确定位最佳估计误差,直至常数前因子。我们的界限推广到多个参数的联合估计。在这种情况下,我们恢复了先前通过基于量子态鉴别和编码理论的技术得出的高温样本缩放。在应用中,我们表明非交换守恒量阻碍了化学势的估计。

估计基底膜输入输出功能...
几何声学(GA)建模技术假设表面相对于感兴趣的波长较大。对于给定场景,从业者通常会创建一个具有大而平坦表面的 3D 模型,以满足很宽频率范围内的假设。这种几何近似会导致模拟声场的空间分布出现误差,因为会影响反射和散射行为的几何细节被忽略了。为了补偿近似值,建模者通常会估算表面的散射系数,以随机地解释反射方向性中实际的、与波长相关的变化。一种更具确定性的方法可以考虑一系列几何细节不断增加的模型,每个模型都在相应的频带上进行分析,以满足大表面尺寸的要求。因此,为了提高 GA 模拟的宽带空间精度,我们提出了一种多分辨率建模方法。使用波纹墙的比例模型测量、我们的方法与非 GA 技术的比较以及一些简单的听力测试,我们将展示
定位和估计甲醛来源
1.文档目的 ..............1 2.文档内容概述 ..........3 3.背景 ..................5 污染物性质 ...............5 生产和用途概述 ........8 4.甲醛排放源 .........13 甲醛产生 ...........13 脲醛树脂和三聚氰胺甲醛树脂生产 ................23 酚醛树脂生产 ......29 聚缩醛树脂生产。。。。。。。。。。41 六亚甲基四胺生产。。。。。。。49 季戊四醇生产。。。。。。。。。。。52 1,4-丁二醇生产。。。。。。。。。。。57 三羟甲基丙烷生产。。。。。。。。.57 4,4-亚甲基二苯胺生产 .......59 邻苯二甲酸酐生产 ........60 使用甲醛基添加剂固体尿素和尿素甲酸酯肥料生产 ....................63 各种树脂应用 ........67 使用甲醛作为原料制造次要产品 .................73 甲醛的其他商业/消费者用途 .....。。。。。。。。。。75 燃烧源。。。。。。。。。。。。。..78 石油炼制 .................84 沥青混凝土生产与使用 .....92 大气中通过光氧化产生甲醛 ..............98 5.源测试程序 ...。。。。。。。。。。。100

职权范围基线评估以估计...
加工者了解、记录和报告咖啡系统中的碳排放和碳封存;与小农户合作的报告,生物多样性报告。评估边界基线评估的边界将是上面提到的四个区,包括小农户(印度咖啡委员会定义的土地面积小于 10 公顷),他们种植咖啡作为主要作物以及其他作物(如黑胡椒)。对于碳足迹评估,温室气体排放和碳封存应侧重于咖啡农场(例如与咖啡生产直接相关)和农场附近的收获后活动。需要努力确保该方法尽可能与 JDEP / Nestle / USAID / ETC 的 CO2e 方法、生咖啡产品分类规则 (PCR)、世界粮食生命周期数据库(Quantis,2016 年)、Ecoinvent v3 指南(Weidema 等人,2013 年)和/或其他相关标准保持一致。

公共帐户和估计委员会
本报告中使用的以下图像将经许可并由其各自所有者版权所能复制,如下所示:Myki徽标 - 第141页上的图像;墨尔本大会和展览中心 - 前封面和第169页上的照片; Ethan Rohloff(皇家儿童医院) - 前封面和第184页的照片;维多利亚时代的淡化厂 - 前封面和第198页的照片;和墨尔本市场管理局 - 前封面和第220页的照片。
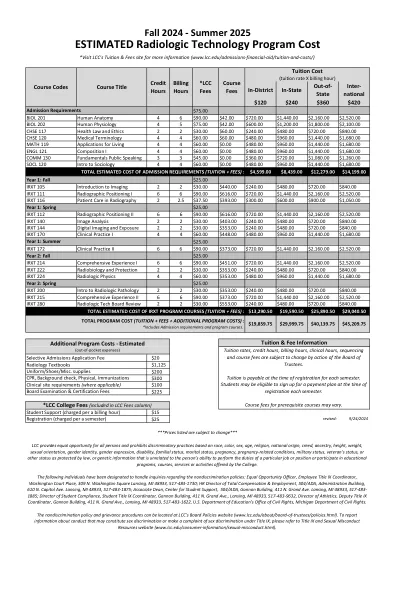
估计的放射技术计划成本
$ 25.00 IRXT 105成像概论2 2 $ 30.00 $ 440.00 $ 240.00 $ 480.00 $ 480.00 $ 720.00 $ 840.00 IRXT 111射线照相定位I 6 6 $ 90.00 $ 616.00 $ 616.00 $ 720.00 $ 720.00 $ 393.00 $ 300.00 $ 600.00 $ 900.00 $ 1,050.00 $ 25.00 IRXT 112射线照相定位II 6 6 $ 90.00 $ 616.00 $ 616.00 $ 720.00 $ 1,440.00 $ 1,440.00 $ 2,160.00 $ 840.00 IRXT 144数字成像和曝光2 2 $ 30.00 $ 353.00 $ 240.00 $ 480.00 $ 480.00 $ 720.00 $ 840.00 IRXT 170临床实践I 4 $ 60.00 $ 448.00 $ 448.00 $ 480.00 $ 373.00 $ 720.00 $ 1,440.00 $ 2,160.00 $ 2,520.00 $ 2,520.00 $ 25.00 IRXT 214全面体验I 6 6 $ 90.00 $ 451.00 $ 720.00 $ 1,440.00 $ 1,440.00 $ 2,160.00 $ 480.00 $ 720.00 $ 840.00 IRXT 224放射物理学4 4 $ 60.00 $ 353.00 $ 480.00 $ 960.00 $ 1,440.00 $ 1,440.00 $ 1,680.00 $ 1,680.00 $ 25.00 IRXT 200 irx 215 Comprehensive Experience II 6 6 $90.00 $373.00 $720.00 $1,440.00 $2,160.00 $2,520.00 IRXT 280 Radiologic Tech Board Review 2 2 $30.00 $553.00 $240.00 $480.00 $720.00 $840.00 $13,290.50 $19,590.50 $25,890.50 $ 29,040.50
从...估计破碎物体的轨道参数
本文简要介绍了一种通过现场碎片测量估算在轨卫星碎片的一些轨道参数(具体而言,特定时间的角动量方向和角动量方向的时间变化)的新方法。与以前的研究一样,这种方法采用了一个约束方程,该方程源于检测到的碎片与现场碎片测量卫星共享地心位置矢量这一事实。然而,与以前的研究不同,这种方法并不采用可以应用于破碎物体升交点赤经变化率的约束方程。相反,这种方法根据探测时的最大或最小地心赤纬来确定破碎物体的倾角。然后,这种方法通过假设一个半径为探测时地心距离的圆形轨道来找出破碎物体升交点赤经变化率的候选者。最后,利用所采用的约束方程,该方法估算了解体时上升节点的赤经,并计算了上升节点赤经变化率的修正值。本文还验证了在理想条件下,即所有探测点都假设在解体物体和现场碎片测量卫星的两个轨道平面的交线上,该新方法的有效性。