XiaoMi-AI文件搜索系统
World File Search System使用点

254纳米杀菌型UV消毒系统
进入建筑物后,应安装在主水服务管上的瓦特Smartstream®紫外线消毒系统,但是在其他整个建筑物的水安全设备(回路预防器或减压阀)之后,以有效地解决微生物问题。也可以在下游安装系统,以保护特定的使用点应用。在灯寿命结束1年结束时,系统的最低紫外剂量应为30 mJ/cm2。该系统的紫外线应由304个不锈钢制成。红色/绿色的LED指示器和Audible警报应是系统控制器不可或缺的一部分,以告知用户当前的操作状态。必须在系统入口之前安装适当尺寸的5微米类型的前滤器,以减少沉积物。安装区域应适合安装系统,并具有足够的终端间隙来更换灯和石英袖子。

地理信息系统的原理实用
1 --- Prerequisites to GIS Practical 2 1A Creating and Managing Vector Data 3 1B a) Adding vector layer 4 1C b) Setting properties c) Vector Layer Formatting 5 1D Calculating line lengths and statistics 6 2A Adding raster layers 7 2B Raster Styling and Analysis 8 2C Raster Mosaicking and Clipping 9 3A Making a Map 10 3B Importing Spreadsheets or CSV files 11 3C Using插件12 3D搜索和下载OpenStreetMap数据13 4A与属性一起工作14 4B地形数据和山坡阴影分析15 5A使用预测和WMS数据16 6A地图topo表和扫描地图17 6B地理提示量8A最近的邻居分析24 8B使用点或多边形25 8C插值点数据

开发一种利用遥感和GIS技术来
关于遥感卫星在湿地上应用的典型早期研究包括:Baker等。(2007)使用Landsat数据来改变美国蒙大拿州的湿地,总体准确性超过76%; Jamal等人(2020)评估印度克什米尔河谷的Landsat卫星数据评估湿地生态系统的土地使用/陆地动力学; Kaplan等。(2017)使用Sentinel 2卫星数据来映射和监视土耳其Eskisehir的湿地。Luong等。 (2015)使用点数据来分析越南南部红树林协会的继任影响; Luong等。 (2019,2021)使用Landsat和ALOS-2数据进行生物量估算和映射红树林的生物量 - 越南湿地生态系统。 li等。 (2021)使用Sentinel 2卫星图像在中国尚金湖湿地估算地上生物量; Sánchez等。 (2019)使用Landsat 8和Sentinel 2用于西班牙南部安达卢西亚的湿地的土地/土地覆盖地图; Slagter等。 (2020)使用Sentinel 2和Sentinel 1数据来映射南非圣卢西亚湿地的湿地特征。 Vanderhoof等。 (2021)使用Sentinel 2用于映射美国东南部的湿地燃烧区域。 早期的研究已经证明并证明并证实了卫星图像数据在实际应用,相关部门,变化动态和/或监测地面覆盖物体随时间的变化(包括湿地生态系统)中的重要和不可替代的作用。Luong等。(2015)使用点数据来分析越南南部红树林协会的继任影响; Luong等。(2019,2021)使用Landsat和ALOS-2数据进行生物量估算和映射红树林的生物量 - 越南湿地生态系统。li等。(2021)使用Sentinel 2卫星图像在中国尚金湖湿地估算地上生物量; Sánchez等。(2019)使用Landsat 8和Sentinel 2用于西班牙南部安达卢西亚的湿地的土地/土地覆盖地图; Slagter等。(2020)使用Sentinel 2和Sentinel 1数据来映射南非圣卢西亚湿地的湿地特征。Vanderhoof等。(2021)使用Sentinel 2用于映射美国东南部的湿地燃烧区域。早期的研究已经证明并证明并证实了卫星图像数据在实际应用,相关部门,变化动态和/或监测地面覆盖物体随时间的变化(包括湿地生态系统)中的重要和不可替代的作用。

对扫描规划和多技术融合对点云数据收集对注册和数据质量的效果的定量调查:邦德大学可持续建筑的案例研究
摘要:建筑行业需要用于各种应用程序,包括建筑物翻新,历史建筑保存和结构健康监测,需要全面,准确的信息。现实捕获技术促进了点云的形式记录本构建的信息。但是,在研究中,扫描计划和多技术融合的新兴发展趋势在研究中尚未充分解决有关它们对建筑环境中云云注册质量和数据质量的影响的研究。本研究旨在广泛研究扫描计划和多技术融合对点云注册和数据质量的影响。使用注册误差(RE)和扫描重叠率(SOR)评估了注册质量,分别代表注册准确性和注册率。相反,使用点误差(PE)和覆盖率(CR)评估数据质量,这表示数据的准确性和数据完整性。此外,本研究提出了一种体素质心方法和PCP速率来计算和优化CR,从而应对量化点云完整性的行业挑战。

昆虫在人类世尼克·布Blüthgen1†,lynn v ...
摘要 - 复杂的3-D方案中的导航需要适当的环境表示,以了解现场的理解和轨迹生成。我们提出了一个高度效率和可扩展的全球导航框架,基于对环境的层析成像理解,以导航多层结构中的地面机器人。我们的AP-PRACH使用点云图生成断层图,以将几何结构编码为地面和天花板高程。然后,考虑到机器人的运动能力,它评估了场景遍历性。通过平行计算来加速绘制构造和场景评估。与直接在3D空间中的计划相比,我们的方法进一步减轻了轨迹产生的复杂性。它通过搜索多个断层切片并分别调整机器人高度以避免悬垂来生成3-D传播。我们在各种模拟方案中评估了我们的框架 - iOS,并在四足动物的机器人上进一步在现实世界中对其进行了测试。我们的方法将场景评估时间减少了三个数量级,并将路径计划速度提高了三倍,与现有方法相比,在各种复杂的3-D环境中表明了高度有效的全球导航。
电压容差边界 - PGE
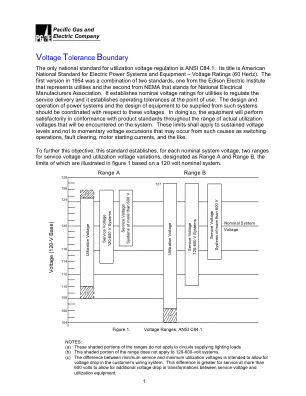
唯一的国家电压调节标准是 ANSI C84.1。其名称为美国电力系统和设备国家标准 - 电压额定值(60 赫兹)。1954 年的第一个版本是两个标准的组合,一个来自代表公用事业的爱迪生电气研究所,另一个来自代表美国电气制造商协会的 NEMA。它为公用事业建立了标称电压额定值以调节服务交付,并在使用点建立了操作公差。电力系统的设计和运行以及由此类系统供电的设备的设计应根据这些电压进行协调。这样,设备将在系统遇到的实际使用电压范围内按照产品标准令人满意地运行。这些限制适用于持续电压水平,而不适用于可能因开关操作、故障清除、电机启动电流等原因而发生的瞬时电压偏移。为了进一步实现这一目标,本标准为每个标称系统电压建立了两个服务电压和使用电压变化范围,指定为范围 A 和范围 B,其限值基于 120 伏标称系统在图 1 中进行了说明。

2D芯片与3D大脑Kwabena Boahen
摘要:人工智能(AI)现在通过每两个月执行两倍的乘法来进步,但是半导体行业瓷砖每两年一次的乘数两倍。此外,从平式乘数铺平的回报在两个维度(2D)中越来越密集,因为信号必须相对越来越远。尽管可以通过将乘数堆叠以在三个维度(3D)中处理知识来缩短旅行,但这种溶液急性地降低了可用的表面积以散发热量。我最近对生物学大脑的计算和通信基本单位的重新概念消除了这种3D热障碍。电流AI使用点产品来模拟突触加权。这个六个十年的突触中心概念认为,整个树突的大脑权重输入以检测一种空间激活模式。树突中心的概念认为,脑命令沿着短的树突进行精心评估,以检测尖峰的时空模式。我的小组现在已经意识到了通过一系列铁电晶体管对学习大脑的树突为中心的概念。从突触中心移动到树突为中心的学习将使AI不与云中的兆瓦进行奔跑,而是用手机上的瓦特运行。
使用移动测绘系统根据点云绘制室内步行环境地图
摘要 摘要 步行性是智慧城市规划中需要解决的问题之一。尽管对户外步行行人进行了大量研究,但对室内步行性的研究却很少。最近,大多数行人倾向于使用室内路线而不是室外路线来保护自己免受日晒雨淋,因为大多数室内路线都位于购物中心和轨道交通站等建筑物上。因此,收集室内建筑物中的所有相关信息以解决步行性问题非常重要。GeoSLAM ZEB REVO 扫描仪因其方便进入狭窄空间、繁忙区域和复杂的建筑结构而受到广泛使用。该扫描仪便于携带,操作员可以将其安装在推车上或用背包携带,易于操作。扫描仪捕获建筑物的几何形状和设施并将其呈现为点云的形式。然后可以使用点云分割方法从点云中提取必要的信息。最终用户(例如城市规划师)可以从最终产品中受益,以使用行人友好型工具设计未来的建筑,以鼓励更多人步行。因此,除了减少道路上私家车的使用外,它还通过提供健康的生活方式给社会带来影响。

常见问题解答:铅和铜 (PbCu) 采样计划 - NJ.gov
如果客户在取样说明中指出以下情形,以下取样点是否仍可在供水系统的取样池中?首先,供水系统应与客户确认客户说明中提供的信息是否正确。如果信息正确,请参阅以下指南和 NJDEP 的 BWSE-18 表格说明。• LSL 或内部铅管道已被更换——仅当对配送系统进行了充分评估并确定有足够多的较高层级的取样点来满足取样要求时,系统才可以停用已成为较低层级的取样点(例如,服务线更换、管道更改等)。换句话说,供水系统必须确定该位置的剩余材料是否符合任何可用的最高层级定义,并相应地修改取样池。 • 取样地点有入口处理点 (POE) 装置或厨房水槽上有使用点 (POU) 处理装置 - 不得从配有用于去除无机污染物的 POU 或 POE(进入住宅或建筑物)处理装置的水龙头中采集样本,除非该处理装置在进入配水系统之前对整个供水进行处理或社区供水系统内的每个站点都配有 POE 装置。

seg-slam:动态室内RGB-D视觉大满贯整合几何和基于Yolov5的语义信息
摘要:同时定位和映射(SLAM)对于移动机器人技术至关重要。大多数vi-sual SLAM系统都假定环境是静态的。但是,在现实生活中,有许多动态对象,会影响这些系统的准确性和鲁棒性。为了改善视觉大满贯系统的表现,这项研究提出了基于定向的快速和旋转简短(ORB)-Slam3框架的动态视觉大满贯(SEG-SLAM)系统,您只能看一次(YOLO)V5深学习方法。首先,基于ORB-SLAM3框架,Yolov5深学习方法用于构建用于目标检测和语义分割的融合模块。此模块可以有效地识别并提取明显和潜在动态对象的先验信息。第二,使用先前的信息,深度信息和表现几何方法为不同的动态对象开发了差异化的动态特征拒绝策略。因此,提高了SEG-SLAM系统的定位和映射准确性。最后,拒绝结果与深度信息融合在一起,并使用点云库构建了无动态对象的静态密集映射。使用公共TUM数据集和现实世界情景评估SEG-SLAM系统。所提出的方法比当前动态视觉大满贯算法更准确,更健壮。