XiaoMi-AI文件搜索系统
World File Search System俯仰

TRAX2 姿态与航向参考系统 (AHRS...
TRAX2 将 PNI 的高灵敏度磁感应传感器与高稳定性 3 轴 MEMS 加速度计相结合,可在各种条件下提供准确的航向信息,并能够克服由局部磁场变化引起的误差。这可提供无漂移、高精度航向、俯仰和横滚以及长期静态精度。
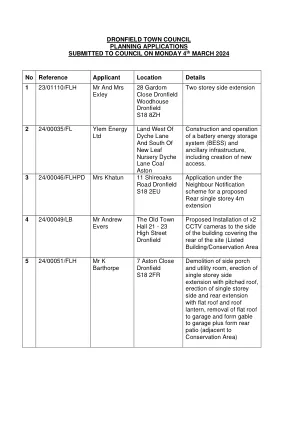
议程-ITEM-71-2024-03-PLANNING-APPLICATIONS-MARCH- ...
拆除侧门廊和公用事业室,竖立带有俯仰屋顶的单层侧面延伸,竖立单层侧面的侧面和后部延伸,带有平坦的屋顶和屋顶灯笼,将平坦的屋顶移至车库,并形成山墙到车库和形状形状后露台(与保护区相邻)
2024-2025 NESS Flyer
此预备会议是为希望在提交顾问和同行之前收到其摘要反馈的个人而设计的。在小组(5-7个人)中,学生将向小组提供2-4分钟的电梯俯仰。不需要参加本届会议,也不保证接受。申请截止日期为2024年11月25日,美国东部时间12:00。

音调演示的类型:
第二次向投资者提供资金。这是一个更深入的演示,共享有关项目的详细信息,并回答问题。资金宣传的目标是说服听众合作,无论是提供资金,专业知识,联系或资源。持续时间:7至10分钟。电梯音高是资金最常见的音高之一。如果您做得很好,以激发投资者的兴趣,则可能会要求您展示一个长格式的音调。这个更长的演示文稿将使您更详细地解释您的业务想法。准备好的音高!旨在增强您在传递电梯和想法俯仰方面的技能。这些简洁的演讲对于给人留下深刻的第一印象并吸引潜在投资者或合作伙伴的兴趣至关重要。该程序主要关注这些较短的音高格式,但重要的是要注意,您所学的基本原理和技术同样适用于更长形式的演示。为音高甲板做准备:如何创建电梯音高电梯俯仰是一种解释创业公司价值,项目的看法以及将带来什么好处的方式。有三个基本组成部分:

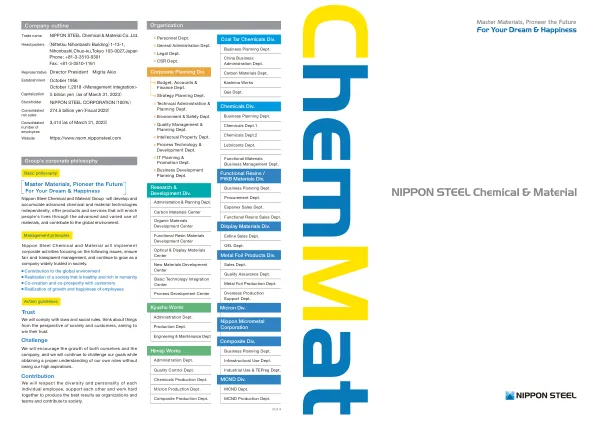
信托贡献主材料,先驱未来...
▪功能性树脂和电路板材料(铜覆盖的层压板(用于非粘附的FPC和环氧树脂树脂)▪显示材料(液体晶体和有机物(液体晶体和有机物)▪紫外线和热固化树脂材料▪金属箔▪金属载体▪用于固定的固定剂▪固定式固定液▪ ▪基于俯仰的碳纤维▪多孔碳材料((燃料电池的催化剂载体)

一项关于大规模空气中细胞间距的影响的研究 -
最近的研究表明,有效的热管理系统对于维持锂电池系统的性能,寿命和安全性是必要的。在这项工作中提出了一种独特而新颖的建模方法,其目的是估算用于大规模锂电池套件的空气冷却系统的热性能。总体模型由子模型组成,包括电池电池的分析模型和电池模块的数值热和流模型,分别针对实验数据和经验相关性进行了验证。所选方法意味着子模型可以独立运行,从而允许精确的瞬态仿真,并减少了处理时间。该模型用于评估细胞间距对专为混合动力汽车设计的气冷电池系统的热性能的影响。结果表明,细胞内的最高温度与横向和纵向俯仰比正相关。但是,模块的最大温度差与这些音高比率为负相关。相比之下,温度均匀性显示非单调的行为,使其成为平衡温度升高和热梯度之间的适用标准。此外,在早期行中注意到了相当大的温度不均匀性,随着俯仰比的降低,这变得不那么显着。

开发简单且低成本的智能手机云台...
智能手机万向节的开发,通过使用微控制器和 MPU 6050 传感器,使其变得简单且更省钱。最近,摄像和图像处理的发展与智能手机技术的快速发展密不可分。最受欢迎的功能之一是相机。手部运动和冲击会导致最大效果减少。为了提高相机拍摄和视频的质量,必须有一个稳定器来稳定相机位置。因此,预计本文的结果能够为廉价的智能手机万向节做出贡献。万向节的设计和实现使用丙烯酸作为材料,厚度为 5 毫米。该 MPU 6050 传感器经过优化,可检测 X、Y 和 Z 轴的摆动或滚动、俯仰和偏航。陀螺仪和加速度计为微控制器提供输入,微控制器将处理 3 个伺服电机的输出,这些伺服电机的作用是将相机的位置保持在指定的设定点。结果表明,MPU 6050 传感器可以响应 1.34° 的滚动、0.25° 的俯仰和 0.78° 的偏航角度读数误差。伺服电机最大运动误差为 1.5°。因此,可以得出结论,万向架可以以更低的成本和更低的误差实现最佳工作。预计下一步研究将增加其他合适且精确的控制,即 PID 或模糊。
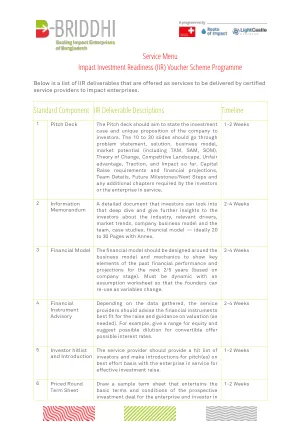
服务菜单影响投资准备就绪(IIR)凭证计划下面的计划是IIR可交付成果的列表,可作为Delive
1个俯仰甲板螺距甲板应旨在陈述公司对投资者的独特主张。10至30张幻灯片应经过问题声明,解决方案,业务模型,市场潜力(包括TAM,SAM,SOM),变革理论,竞争格局,不公平优势,吸引力和影响力,到目前为止,资本提高要求和财务预测,团队详细信息,未来的里程碑式/下一步以及投资者或企业所需的任何其他分会。

AHRS500
性能更新率 (Hz) 25 或 100 请参阅订购信息完整准确度数据 (秒) < 90 航向范围 (°) 0 至 360 准确度 (°) ± 2 FAA TSO C6d 测试条件分辨率 (°) 0.1 姿态滚转范围 (°) ± 180 俯仰范围 (°) ± 90 准确度 (°) ± 2.5 FAA TSO C4c 测试条件垂直度 (°) < 1.0 分辨率 (°) 0.1 环境 1 FAA DO-160D 测试条件工作温度 (°C) -40 至 +70 非工作温度 (°C) -55 至 +85 工作振动 (g rms) DO-160D,第 8 部分 S 类,曲线 M; U 类 EMI DO-160D,第 20 节 W 类 DO-160D,第 21 节 M 类 防水/防潮密封外壳 海拔 (ft) 35,000 最大角速率 ( °/秒) 200 滚动、俯仰或偏航 最大加速度范围 (G) 10 电气输入电源电压 (VDC) 12V 或 24V 电气。系统 DO-160D 第 16 节,类别。B 输入功率 (W) < 4 @ 12 VDC 数字输出格式 RS-232 物理尺寸 (英寸) 4.66 x 4.53 x 4.863 不包括安装法兰 (厘米) 11.84 x 11.51 x 12.35 不包括安装法兰 重量 (磅) 3.5 (千克) 1.6 连接器 15 针 Sub-Min DB 公头