XiaoMi-AI文件搜索系统
World File Search System光雷达

用于远距离检测和跟踪的扫描激光雷达......
摘要:在过去的几年中,滥用民用无人机或无人机(无人驾驶飞机)一直是一个令人关注的问题。作为响应,已经开发了多个系统,包括光学,电子甚至声学技术,以进行检测和跟踪。不幸的是,由于其小小的,十分尺寸的大小以及形状和行为的巨大变化,无人机代表了一个具有挑战性的目标。在该博士学位上,我们开发了一种激光雷达(光检测和范围)系统,以解决此问题以拆除一公里处。在我们的系统中,范围是使用ight原理的时间来获取的,并通过使用双轴电量器依次扫描场景来完成图像。我们利用扫描多功能性开发了多种操作模式。标准检测模式使用大量视图的栅格扫描捕获场景的图像。跟踪模式基于围绕目标的本地模式,该模式以非常高的速率更新,以使目标保持在其边界内。e Ort被纳入了我们扫描激增的众多参数的理论和数值优化研究中,以便在最大范围,本地化分辨率和速率方面达到表现性能。用于检测和跟踪模式的模式优化是主要焦点,使用检测的目标概率作为最大化的函数。目标大小,速度和替代性也引入了检测的概率,从而完整概述了系统性能。该原型在几周的试验中测试了无人机检测和跟踪。在我们的LiDAR平台上,从头开始开发,每个组件的表征都可以丰富和验证我们的模型。成功之后,候选人启动和监督了工业前的整合过程。
中美新兴技术领域的竞争:激光雷达
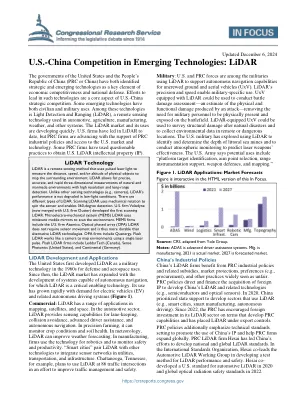
美国政府和中华人民共和国政府都将战略性和新兴技术视为经济竞争力和国防的关键要素。争取在这些技术领域占据领先地位是中美战略竞争的核心方面。一些新兴技术既有民用用途,也有军用用途。这些技术中包括光检测和测距 (LiDAR),这是一种用于汽车、农业、制造、气象和其他系统的遥感技术。LiDAR 市场及其用途正在迅速发展。迄今为止,美国公司在 LiDAR 领域处于领先地位,但中国公司在中国产业政策的支持以及美国市场和技术的准入下也取得了进展。一些中国公司使用可疑的做法来获取美国 LiDAR 知识产权 (IP)。

推进森林清单:使用专业激光扫描仪的低成本MLS激光雷达设备的比较研究
1农业,食品和环境科学系理工学院(M. Raballo,Alessandro.vitali.vitali)@staff.univpm.it 2矿业开发与勘探系 Systems Science, Eth Zurich, Switzerland Arnadi.murtiyoso@usys.ethz.ch 4 Universit´E de Strasbourg, Save Strasbourg, Cnrs, Icube Laboratory Umr 7357, Photogrammetry and Geomatics and Geomatics Group, france arnadi.murtiyoso@insa-strasbourg.fr 5 Dragones Research Group, Escuela de Ingenier'农业Y Forestal(校园de Ponferrada),AV。astorga S/N,24400 Ponferrada,西班牙flor.alvarez@unileon.es 6 Hazi Fundazioa,Granja Modelo de arkaute,01192 Vitoria -Gasteiz,西班牙 - 西班牙-Acantero@hazi@hazi.hazi.es equhazi.es 7 imib -csic,spsic de miers de Mieres,astain,Astain,AST.ASTURIAS,ASTOLOL,ASTOLOL,ASTOLOL,RODBOLF,RODFOLF,RODFOLF,RODFOLF,RODBOLF,RODBOLF,RODBOLF。 Diego.laino)@CSIC.ES 8大学,Marthe的理工学院,民用,建筑工程和建筑学系(SAD)r.pierdicca@staff.univpm.it

基于激光雷达的机器人检查电源线的对象识别
摘要:本文使用在自主机器人中实现的光检测和范围传感器提出了一种新技术,用于对高压传输线(LARA)的多模式预测检查。该方法通过使用人工智能技术提供垂直感知并分类传输线组件,从而增强了机器人的功能。基于激光雷达的系统着重分析对象的二维(2D)切片,减少数据量并提高计算效率。对象分类是通过计算2D切片中的绝对差异来创建唯一签名来实现的。当在真实机器人上使用Raspberry Pi上的K-Nearest邻居网络进行实验评估时,该系统在线性运动实验中准确检测到的对象,例如减震器,信号和绝缘体。结果表明,这种方法显着提高了Lara识别电力线组件,达到高分类精度并具有先进自主检查应用的潜力。

使用机器学习和高分辨率激光雷达地形数据绘制丘陵景观的地形
地图是评估土壤和生态杂质的过程和危害,水文建模以及自然资源和土地管理的重要工具。基于现场调查或航空照片的映射土地形式的传统技术可能是时间和劳动密集型,强调了基于遥感产品的自动或半自动方法的重要性。此外,时间密集的手动标记也可以是主观的,而不是对地形的客观识别。在这里,我们实施了一种客观的方法,该方法将随机的森林机器学习算法应用于一组观察到的地形数据和1M水平分辨率裸露的数字高程模型(DEM),它是从空气中的光检测和范围数据(LIDAR)数据开发的,以快速映射丘陵地面的各种地面地面。地面分类包括高地高原,山脊,凸面,平面斜坡,凹陷坡,溪流通道和山谷底部,横跨俄克拉荷马州东北部俄克拉群岛的Ozark山脉的400公里2丘陵景观。我们使用了4200个地面观测值(每个地形600个)和八个从随机森林算法中的2 m,5 m和10 m分辨率LIDAR DEM得出的地形指数,以开发2 m,5 m和10 m分辨率地分辨率地面地面模型。我们通过比较观察到的地貌与建模地面的地图来测试DEM分辨率在映射地图中的有效性。结果表明,当协变量以2 m的分辨率分辨率为〜89%时,该方法绘制了约84%的观察到的地形,分辨率为10 m。使用这种方法开发的地图图具有多种潜在应用。然而,预测的地图显示,2 m分辨率的协变量在捕获准确的地形边界和小型地面的细节(例如溪流通道和山脊)方面表现更好。与使用空中图像和现场观测值相比,此处介绍的方法大大减少了绘制地图的时间,并允许掺入各种各样的协变量。它可以用于水文建模,自然资源管理,并在丘陵景观中表征土壤地球形过程和危害。

用于环境保护数据采集的激光雷达传感器小型卫星设计与分析
摘要。本研究介绍了一种小型卫星设计的设计和分析,该卫星搭载了用于环境保护的数据采集的激光雷达传感器。该项目探索了立方体卫星技术,首先概述了国际和希腊航天部门、“新太空”产业的兴起及其经济影响。该设计侧重于在立方体卫星框架内开发和集成激光雷达传感器,详细介绍了立方体卫星设计的历史背景、工程标准和开发生命周期。研究的关键要素包括彻底检查立方体卫星的子系统,例如有效载荷(激光雷达传感器)、轨道确定和控制(ADCS)、推进、电信、热保护、机载计算和电力系统。该研究还涵盖了设计规划、软件开发、成本估算和潜在挑战的识别。此外,该研究深入探讨了激光雷达技术的运行原理、其在科学和研究中的意义以及与其他数据传输技术的比较。该研究还涉及激光雷达传感器数据的高级数据分析技术,重点是信号处理、物体检测和特征提取。最后一部分评估了卫星数据在 C6ISR(指挥、控制、通信、计算机、网络、情报、监视和侦察)信息管理系统中的作用及其在希腊聚光灯中的应用。它探讨了卫星图像与人工智能的集成,以增强数据分析和决策能力。总体而言,这项综合研究旨在促进配备激光雷达传感器的立方体卫星设计的进步,为技术创新及其在环境保护中的应用提供宝贵的见解

Haidilao International Holding Ltd。 海底捞国际... 附录I会计师的报告 (1)债权人对子公司和(2)业务更新的自愿清盘 AAC Technologies Holdings Inc. 我们医生控股有限公司微医控股有限公司 Geely Automobile Holdings Limited 中国下一代商业和供应链有限公司 Carote Ltd 与出版的进一步延迟有关的补充公告 激光雷达解决方案市场 股票代码:6996 中国新经济基金有限公司中国新经济投资... Sciclone Pharmaceuticals(Holdings)Limited 2022 BYD CSR报告 Zhongzhi Pharmaceutical Holdings Limited中智药业控股... 历史,重组和公司...
该小组在2024年上半年获得了收入和核心营业利润(非IFRS量度)双重增长,与往年同期相比,达到了创纪录的高点。在2024年上半年,该集团的营业收入为21,4.909亿元,比2023年同期增长了13.8%;该集团Haidilao餐厅的总体营业额每天4.2次。我们所有餐厅提供的客户总数超过了2.099亿。该集团的利润为2,0.31亿元人民币,比2023年的同期减少了10.0%,这主要是由于外汇净收益和损失的变化以及额外增值税(“ VAT”)额外增值税(“ VAT”)扣除额的影响。该集团的核心营业利润(非IFR措施)为27.989亿元,与2023年同期相比,增加了13.0%。有关最直接可比的国际财务报告标准(“ IFRS”)措施的定义和和解量和集团的核心营业利润(非IFRS措施),请参阅本公告中的“管理讨论和分析 - 核心营业利润(非IFRS措施)”。

tc-ltio:激光雷达和视觉进程降解环境的紧密耦合激光偶尔惯性进程
自动移动机器人在交付,制造,耕作,采矿和太空探索的自动化中起着重要作用。尽管这些机器人在传统上依靠其与GNSS/INS系统的本地化[1],但在室内,室内,屋顶或茂密植被的区域,在发生信号损失的情况下,会出现挑战。为了克服这一限制,已经提出了同时定位和映射(SLAM)[2]方法。猛击通常将其分为光检测和范围(LIDAR)大满贯和视觉猛击,具体取决于所用的主要传感器。LIDAR SLAM在涉及敏捷运动和复杂结构化环境的场景中具有很高的精度和鲁棒性,这是由于其能力直接使用多个射线直接测量对象和传感器之间的距离[3]。但是,由于LiDar SLAM通过匹配每种结构扫描来执行定位,LIDAR的大满贯可以在无结构的场景中退化,例如隧道,庞大的平面和走廊[4]。另一方面,视觉猛击,利用RGB图像的纹理信息可以在无结构环境中起作用,因为它依赖基于纹理的特征,即使在缺乏明确的结构元素的场景中,也可以提取这些特征[5]。然而,视觉大满贯的规模估计有弱点,并且可以在照明条件下快速变化。为了解决LiDAR和Visual Slam的局限性,已经提出了各种LiDAR视觉大满贯方法,这些方法同时整合了LiDar和Visual Sensor的信息[6-8]。这些方法可以有效地处理结构和,因为这些方法大多数都依赖于松散耦合的方式(系统间融合)[6,7],这两个系统中的故障都会导致总体猛击失败。为了解决松散耦合方式的弱点,已经提出了紧密耦合的方法(功能间融合)[8]。
将扩散模型缩放到现实世界3D激光雷达场景完成
计算机视觉技术在自动驾驶汽车的感知堆栈中起着核心作用。使用此类方法来感知给定数据的车辆周围环境。3D激光雷达传感器通常用于从场景中收集稀疏的3D点云。然而,根据人类的看法,这种系统努力鉴于那些稀疏的点云,因此很难塑造现场的看不见的部分。在此问题中,场景完成任务旨在预测LiDAR测量中的差距,以实现更完整的场景表示。鉴于最近扩散模型作为图像的生成模型的有希望的结果,我们建议将其扩展以实现单个3D LIDAR扫描的场景。以前的作品使用了从LiDAR数据提取的范围图像上使用扩散模型,直接应用了基于图像的扩散方法。差不多,我们建议直接在这些点上操作,并介绍尖锐的和降解的扩散过程,以便它可以在场景规模上有效地工作。与我们的方法一起,我们提出了正规化损失,以稳定在denoising过程中预测的噪声。我们的实验评估表明,我们的方法可以在单个LIDAR扫描中完成场景,作为输入,与最新场景完成方法相比,产生了更多详细信息的场景。我们认为,我们提出的扩散过程公式可以支持应用于场景尺度点云数据的扩散模型中的进一步研究。1
使用 DQ-1 卫星上的轨道高光谱分辨率激光雷达测量气溶胶光学特性:检索和验证
摘要。大气环境监测卫星 (AEMS),也称为大旗一号或 DQ-1,于 2022 年 4 月发射;其主要有效载荷之一是高光谱分辨率激光雷达 (HSRL) 系统。这个新系统能够精确测量全球气溶胶的光学特性,在云气溶胶激光雷达和红外探路者卫星观测 (CALIPSO) 卫星退役后,可用于地球科学界。开发合适的检索算法并验证检索结果是必要的。本研究展示了一种使用 DQ-1 HSRL 系统的气溶胶光学特性检索算法。该方法检索了气溶胶的线性去极化率、后向散射系数、消光系数和光学深度。为了验证目的,我们将检索到的结果与通过 CALIPSO 获得的结果进行了比较。结果表明,两组数据的曲线高度一致,DQ-1 的信噪比 (SNR) 有所提高。美国国家航空航天局 (NASA) 微脉冲激光雷达网络 (MPLNET) 站的光学特性曲线被选中与 DQ-1 测量值进行验证,相对误差为 25%。2022 年 6 月至 2022 年 12 月期间,使用 DQ-1 卫星和 AErosol RObotic NETwork (AERONET) 进行的气溶胶光学深度测量进行了关联,得出的 R 2 值等于 0.803。我们使用 DQ-1 数据集初步研究了撒哈拉沙尘和南大西洋的输送过程