机构名称:
¥ 1.0
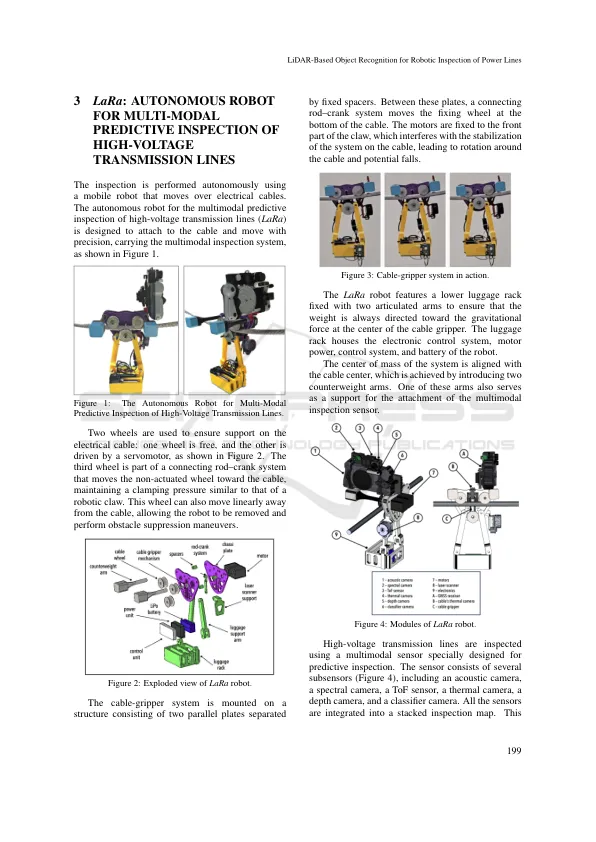
摘要:本文使用在自主机器人中实现的光检测和范围传感器提出了一种新技术,用于对高压传输线(LARA)的多模式预测检查。该方法通过使用人工智能技术提供垂直感知并分类传输线组件,从而增强了机器人的功能。基于激光雷达的系统着重分析对象的二维(2D)切片,减少数据量并提高计算效率。对象分类是通过计算2D切片中的绝对差异来创建唯一签名来实现的。当在真实机器人上使用Raspberry Pi上的K-Nearest邻居网络进行实验评估时,该系统在线性运动实验中准确检测到的对象,例如减震器,信号和绝缘体。结果表明,这种方法显着提高了Lara识别电力线组件,达到高分类精度并具有先进自主检查应用的潜力。
基于激光雷达的机器人检查电源线的对象识别
主要关键词


相关文件推荐