机构名称:
¥ 1.0
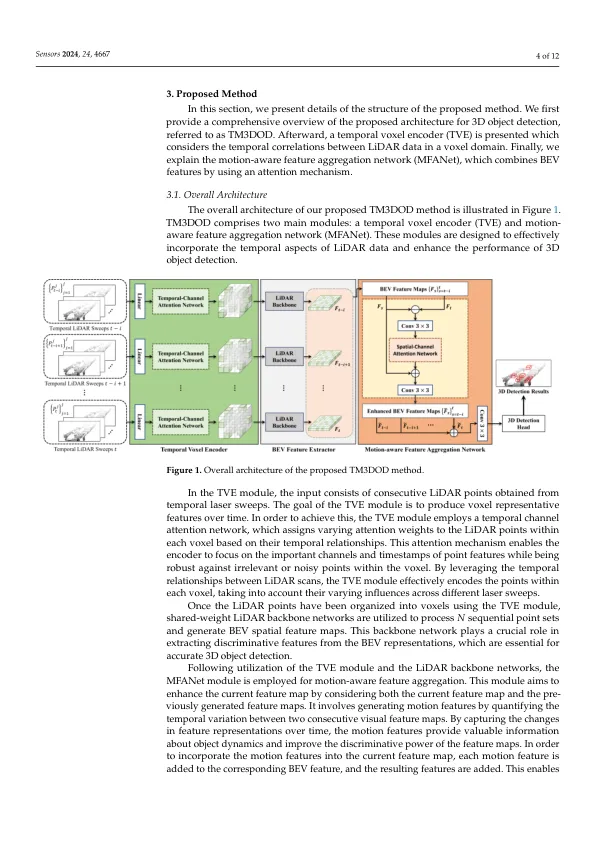
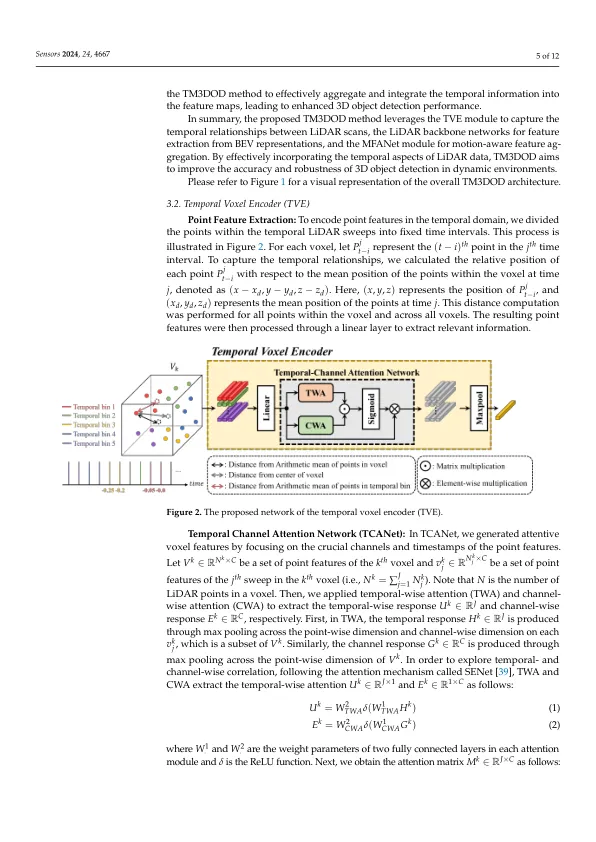
摘要:最近,行业对自动驾驶的需求不断增长,引起了对3D对象检测的极大兴趣,从而导致许多出色的3D对象检测算法。但是,大多数3D对象检测器仅专注于一组激光雷达点,而忽略了它们通过利用连续的激光雷达点提供的信息来提高性能的潜在能力。在本文中,我们提出了一种新颖的3D对象检测方法,称为时间运动感知3D对象检测(TM3DOD),该方法利用了时间发光剂数据。在提出的TM3DOD方法中,我们通过使用连续的BEV特征映射生成运动功能来汇总LIDAR VOXER和当前BEV特征。首先,我们提出了时间体素编码器(TVE),该编码器(TVE)通过捕获体素内的点集之间的时间关系来生成体素表示。接下来,我们设计一个运动吸引特征聚合网络(MFANET),该网络旨在通过量化两个连续的BEV特征图之间的时间变化来增强当前的BEV特征表示。通过分析BEV特征图随时间推移的差异和变化,MFANET捕获运动信息并将其集成到当前特征表示中,从而使3D对象更加可靠,更准确地检测。对Nuscenes基准数据集的实验评估表明,与基线方法相比,提出的TM3DOD方法在3D检测性能方面取得了显着改善。此外,我们的方法与最先进的方法达到了可比的性能。
基于激光雷达的3D时间对象通过运动...
主要关键词
相关文件推荐